
最新成果
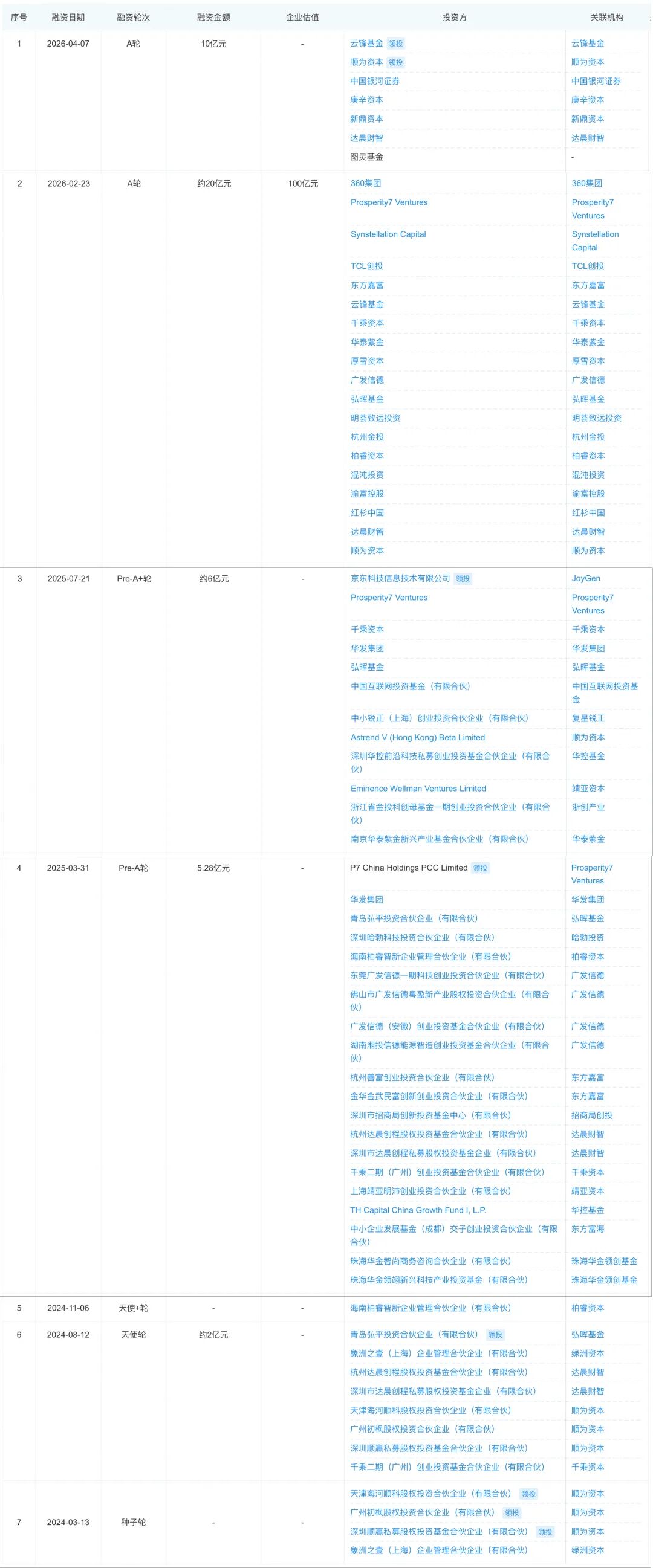
1. 2026年4月7日,再获10亿元融资
2026年4月7日,千寻智能宣布完成新一轮10亿元融资。本轮融资由顺为资本、云锋基金(马云等人发起)联合领投,达晨财智、某头部人民币基金、银河源汇、图灵基金、新鼎资本、庚辛资本等参与加持。继2月完成近20亿元融资后,公司在短短30天内累计融资30亿元,成为当期具身智能赛道最受关注的公司之一。

来源:千寻智能公众号
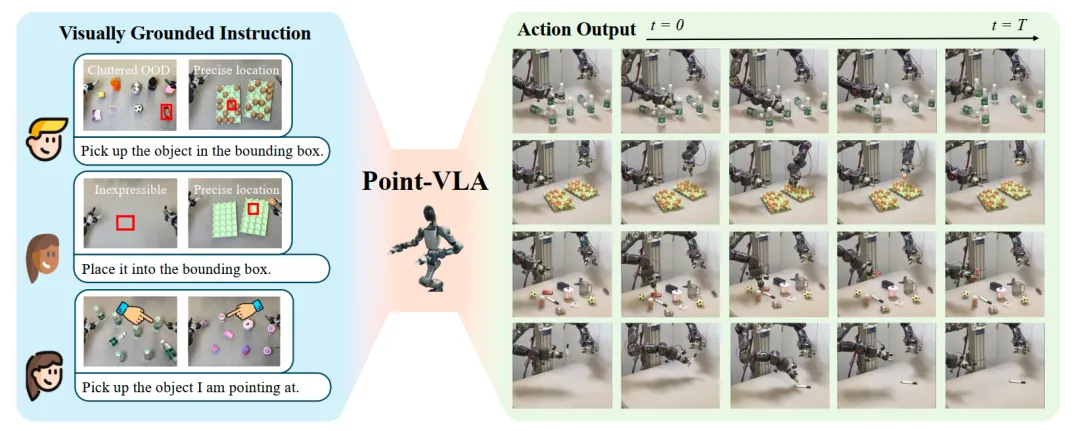
2. 视觉定位VLA:Point-VLA
Point-VLA的核心创新,在于首次将视觉定位直接引入VLA指令体系。通过在图像中叠加边界框,模型能够保留语言中的高层操作意图,同时将目标物体或目标位置的精确信息交给视觉grounding处理。训练阶段,模型联合学习纯文本指令与视觉定位指令;推理阶段,则可直接利用边界框提供的像素级线索完成动作执行。
来源:千寻智能论文
在6类真实机器人操作任务中,Point-VLA平均成功率达到92.5%,相比纯文本VLA的32.4%提升近3倍;其中,杂乱场景抓取成功率从43.3%提升至94.3%,精确放置任务从23.3%提升至90.0%。与此同时,团队还构建了基于MLLM的自动标注pipeline,可从演示视频中自动生成边界框监督信号,为具身模型在复杂真实场景中的规模化训练与落地提供了新路径。
项目主页:https://yuhang-harry.github.io/Point-VLA
论文地址:https://arxiv.org/pdf/2512.18933
3. 开源具身模型:Spirit v1.5

来源:千寻智能公众号
博客地址:https://www.spirit-ai.com/en/blog/spirit-v1-5
公司介绍
千寻智能(Spirit AI) 成立于 2024 年,由 韩峰涛(前珞石机器人联合创始人兼CTO)与 高阳(伯克利博士、清华大学交叉信息研究院助理教授)、机器人出海先行者郑灵茵联合创立共同创立,定位为AI+机器人全栈的具身智能公司,目标是“10 年让全球 10% 的人拥有自己的机器人”。公司聚焦通用人形机器人与具身大模型/学习算法的研发与落地。
公司官网:https://www.spirit-ai.com/
公开信息显示:截止2026年4月8日,公司估值已达到100亿元人民币(来自企查查)。
核心团队
联合创始人 郑灵茵,具备工业机器人出海与商业化经验,负责海外团队与市场拓展。
代表产品

来源:千寻智能官网
在硬件层面,Moz1搭载自研一体化力控关节,功率密度全球领先、较Optimus高15%+,并配套自研灵巧手,在刚性强度、负载能力和动态响应速度上表现突出。与此同时,千寻智能还围绕Moz1开展了本体柔性振型仿真、热流体与热极限分析,以及轻量化高刚性拓扑优化,实现同刚度下重量减轻25%。

来源:千寻智能 孙荣毅 公开演讲
在工程化与供应链能力方面,Moz1背后体现的是千寻智能完整的系统设计与产业化能力。公司已积累7年力传感器研发经验、30000+关节力传感器应用经验、100,000+轴传动应用经验,并具备弯折寿命超过千万次的机器人电缆设计能力,使Moz1在整机稳定性、场景适配性与量产落地能力上具备较强竞争力。

来源:千寻智能 孙荣毅 公开演讲
来源:千寻智能 孙荣毅 公开演讲
落地进展
 来源:千寻智能公众号
来源:千寻智能公众号
2. 携手京东,从咖啡制作切入,验证零售场景闭环路径
2026年3月,千寻智能与京东集团正式达成战略合作,双方将在2026年至2029年围绕产品定制、技术协同、场景开放与营销共建展开深度合作。作为首个落地成果,Moz机器人已在京东MALL上岗,承担高精度咖啡制作任务,并同步采集多模态感知、运动轨迹与力反馈数据,跑通“数据采集—模型训练—场景落地”闭环。这标志着具身智能正从单点验证走向零售场景规模化落地。

来源:千寻智能公众号
核心专利
从公开专利看,千寻智能的核心专利主要集中在人形机器人关节模组、全身阻抗控制、末端执行器、遥操作系统与场景化具身抓取等方向,已形成从本体硬件到控制与操作算法的关键技术布局。
一种轮式人形机器人的任务自适应全身可变阻抗控制方法CN121608155A,于2026年3月6日公开,体现其在轮式人形机器人全身控制与任务自适应阻抗调节方向的技术布局。
一种具有过载保护功能的智能机器人末端执行器CN121552427A,于2026年2月24日公开,体现其在末端执行器安全保护与高可靠作业方向的工程能力。
一种自适应机械臂关节阻抗控制方法及系统CN121061868A,于2025年12月5日公开,体现其在机械臂柔顺控制与精细操作方向的技术布局。
一种基于动作捕捉设备的机器人遥操作算法系统CN120985651A,于2025年11月21日公开,体现其在遥操作与真机数据采集方向的技术储备。
一种伺服编码器集成式机器人一体化关节CN120645253A,于2025年9月16日公开,体现其在机器人关节一体化设计与核心硬件集成方向的工程能力。
千寻智能核心专利合集下载千寻智能核心专利合集
融资进展
融资历程
投资方(上市公司)
TCL科技(对应:TCL创投)
京东集团(对应:京东科技信息技术有限公司 / JoyGen)
三六零(对应:360集团)
中国银河(对应:中国银河证券)
广发证券(对应:广发信德)
华泰证券(对应:华泰紫金)
延伸阅读
更多人形机器人资料,进入「AI工业」知识星球,搜索「人形机器人」进行查看。
声明:本文基于千寻智能公众号等公开资料整理,含作者个人非官方观点,仅供学习交流,不构成投资建议;如涉版权问题,请联系后台处理。未经授权,禁止转载。
? 扫码加入「AI工业/机器人」知识星球,获取更多资料

