
具身智能的“奇点”:当大模型穿上“马甲”,物理世界的变革开始了
2026年,我们正在见证一场比大语言模型爆发更具颠覆性的变革。如果说过去的AI是在虚拟世界里“指点江山”,那么现在的AI正正式接管物理世界。
思考与总结
长期以来,人工智能一直面临着一个尴尬的“莫拉维克悖论”:让AI像人类一样下棋、写代码很容易,但让它像三岁小孩一样折叠衣服、清理桌面却难如登天。过去,我们试图通过精准的数学建模来教机器人干活,但现实环境的复杂性(如摩擦力、材质、杂乱的客厅)让传统路径走入了死胡同。
自变量机器人(X Square Robot)的崛起,标志着“生成式行动”时代的到来。它的核心逻辑不再是“先造身体再配软件”,而是“模型定义本体”:先给AI一个理解物理世界的超级大脑(WALL-A),再根据大脑的需求去进化身体。这种范式转移,让它在短短几年内获得了互联网三巨头(阿里、美团、字节)的超10亿元罕见共同注资,成为定义物理世界智能变革的核心变量。
一、 从“缸中之脑”到“生成式行动”
过去十年,以ChatGPT为代表的AI是“缸中之脑”,它们博学多才,却无法感知重力、摩擦力或物体的硬度。2026年被视为具身智能(Embodied AI)商业化探索的元年。
物理化跃迁:具身智能要求智能体不仅要有处理信息的“大脑”,还要有感知环境的“传感器”和执行任务的“身体”。
技术红利:受益于Transformer架构在视觉与控制领域的成功泛化,机器人不再依赖硬编码编程,而是通过模仿学习和强化学习,从海量视频和仿真中习得通用技能。
二、 自变量的DNA:清华系学术基因与“注意力”信仰
自变量机器人的成功并非偶然,其创始人王潜是深度学习领域的先驱。
开创性研究:早在2014年,王潜在清华读研期间就发表了关于神经网络注意力(Attention)机制的开创性论文,这被视为后来Transformer架构的核心思想基石之一。
算法映射:这种对“注意力”的深刻理解,使得自变量机器人能在纷繁复杂的物理环境中,像人眼一样快速聚焦关键目标(如杂乱桌面上的杯子),而忽略背景噪声。
命名哲学:在函数 中,公司取名“自变量”意为要做驱动变化的源头 ,而非被动反应的 。
三、 核心科技:能“三思而后行”的机器人
自变量机器人的护城河,在于其全栈自研的软硬一体架构。
1. WALL-A:通用具身智能大模型
这是机器人的技术灵魂,采用了完全端到端(Full End-to-End)的架构。
跨模态输入:直接接收视觉流、点云、力反馈及自然语言指令。
具身思维链(ECoT):这是自变量的杀手锏。当机器人接到“整理脏衣服”的指令时,它不会盲目行动,而是在潜空间进行物理推理:识别衣服、推理其易形变的属性、规划子目标,并根据抓取时的触觉反馈进行动态纠错。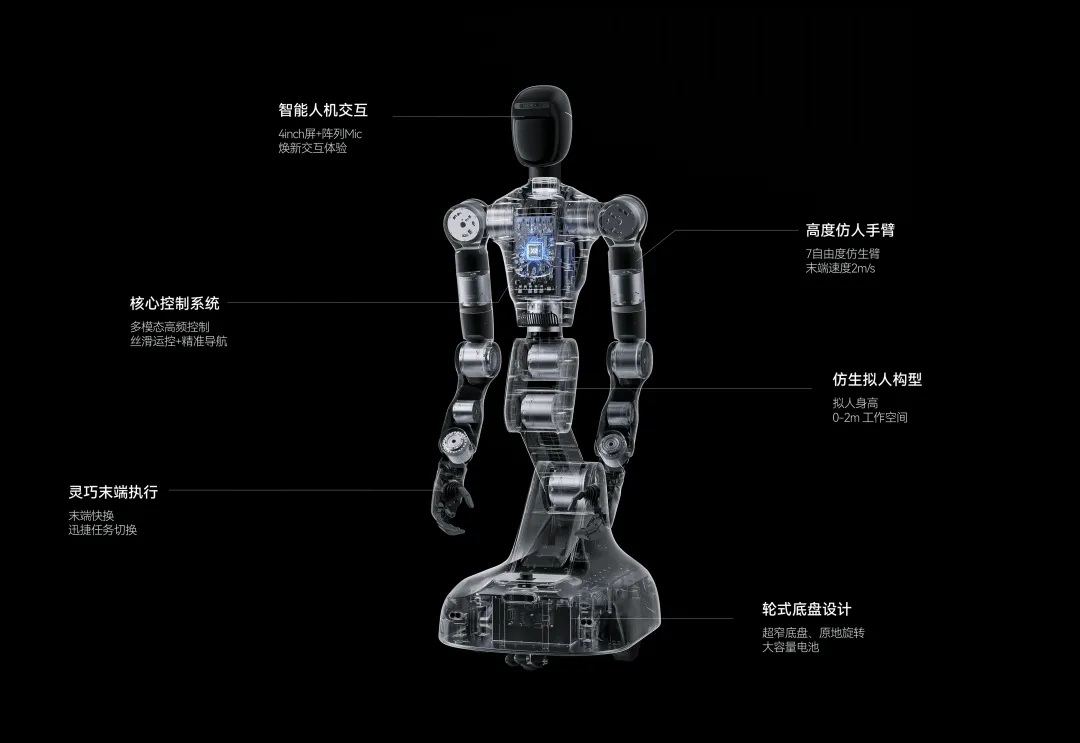
2. 量子系列(Quantum)与灵巧手
量子2号:拟人化的通用智能体,具备高动态力控,能直接复用为人类设计的工具(如开门、按电梯)。
ArtiXon灵巧手:拥有多达20个自由度,支持亚毫米级精密操作,甚至能完成穿针引线等极高难度动作。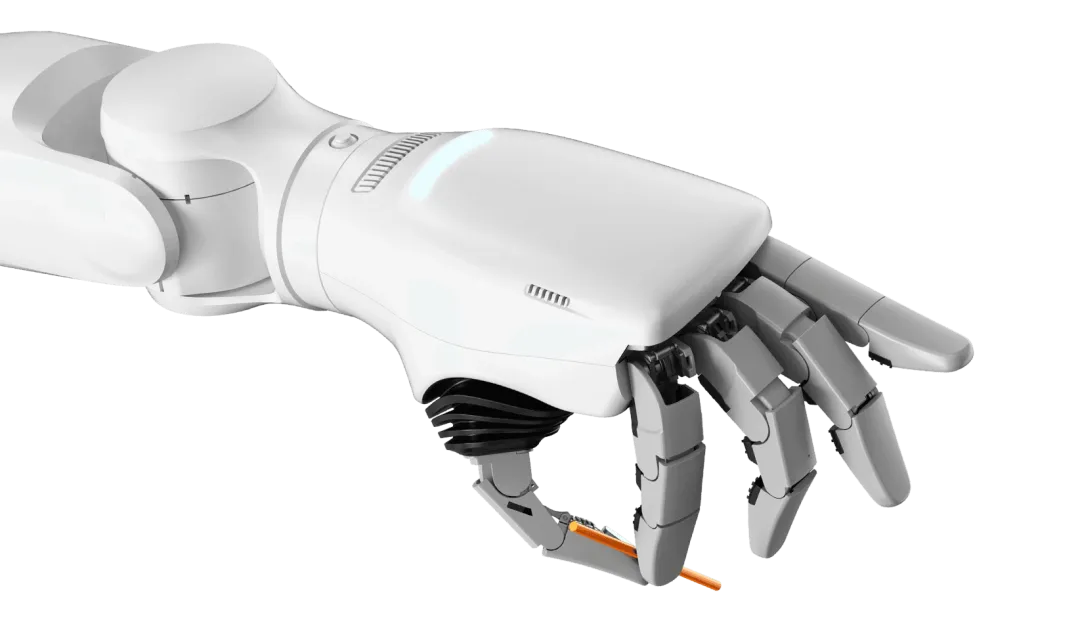
四、 资本盛宴:三巨头为何罕见“会师”?
2026年1月,自变量完成10亿元A++轮融资,阿里、美团、字节跳动共同出现在投资名单上。 这场注资背后有着深层的战略考量:
| 巨头 | 战略诉求 | 落地场景 |
| 美团 | 应对人口红利消退,寻求劳动力替代 | 后厨备餐、配送“最后100米”入户 |
| 阿里巴巴 | 智慧物流与云计算生态布局 | 菜鸟仓储异形包裹分拣、拆码垛 |
| 字节跳动 | 数据闭环与多模态模型反哺 | 物理世界交互数据与短视频数据的深度融合 |
估值逻辑的重构:资本市场不再按“卖硬件”给自变量估值,而是将其视为掌握物理世界通用大模型和数据入口的数据公司。
五、 落地与挑战:2026的关键一役
自变量的商业化策略非常务实,选择了“泛化操作”需求强烈的B端场景切入:
新零售:酒店更换纸巾、餐厅精准切菜配餐。
柔性制造:解决传统工业臂难以胜任的线束整理等难题。
面临的挑战:
数据鸿沟:如何缩小仿真环境与现实世界(Sim-to-Real)之间的差距,获取高质量的“手感”数据。
成本极限:要进入家庭,目前几十万人民币的整机成本需降至消费级水平。
巨头博弈:在多巨头投资背景下,如何保持独立性是管理层的艺术。
如果说大模型重塑了人类的知识工作,那么具身智能将重塑人类的物理劳动。2026年,自变量机器人能否像OpenAI定义数字世界那样,通过“模型定义本体”定义物理世界的规则?我们拭目以待。
