
这边要具体说一下机器人的执行器,这个概念可能还有不少人不太清楚。
机器人执行器有点像人的肌肉和关节,再加韧带腱鞘。
以下内容摘录自晚点团队的文章《 拆解特斯拉机器人供应链:30 多位从业者看到的泡沫和希望》
人体是人类科学目前无法企及的精妙设计。比如当你俯身抱起 20 公斤的大箱子,全身肌肉都会参与联动:力从脚底开始,脚踝关节微曲,让重心下沉,大小腿的肌群随即接管;腰腹部的深层核心肌肉锁住腰椎,防止损伤;当双手抱住箱子时,肩胛已经收紧,为手臂提供支点;起身则是腿和臀一同上蹬,将力量沿着躯干、肩胛送到前臂,让箱子平稳离开地面。而控制这一切,人的大脑基本都不太需要工作。
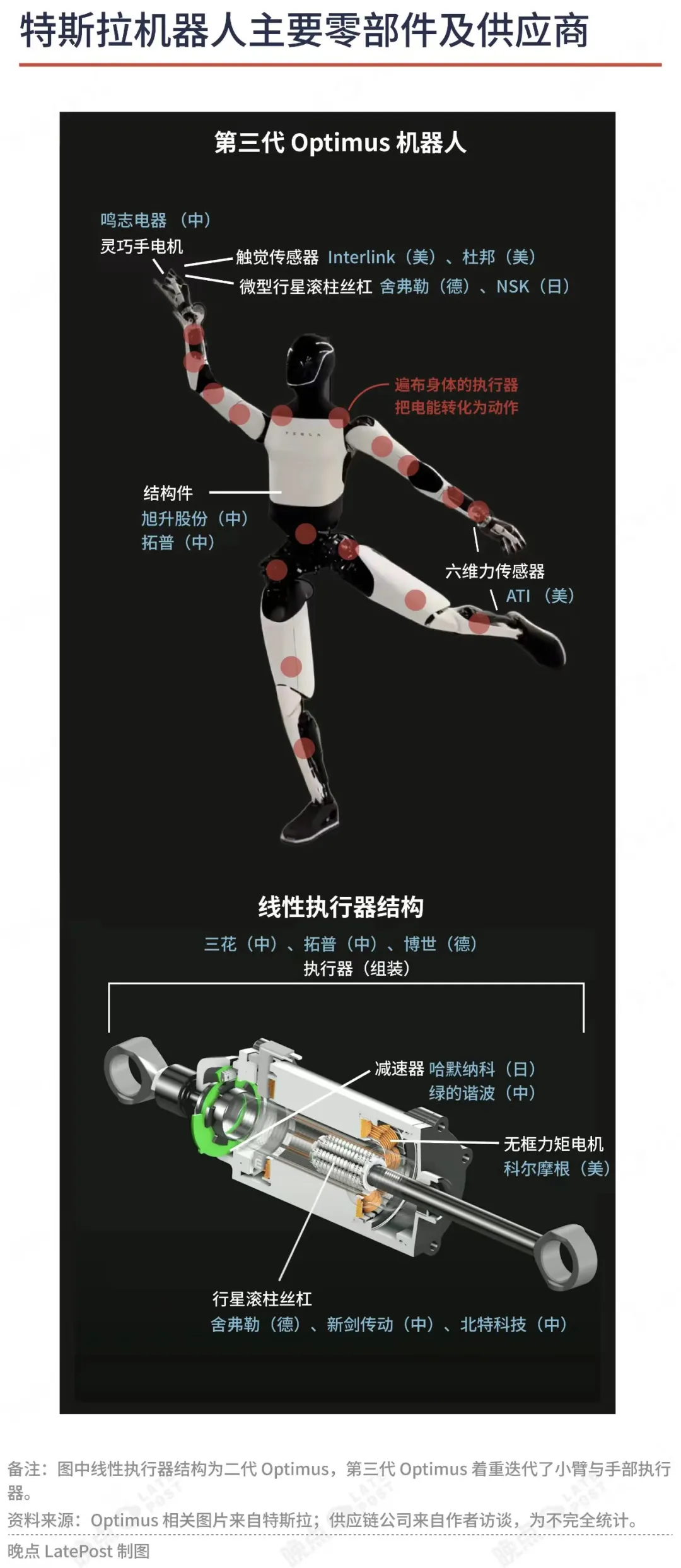
人形机器人不能像人一样装 600 多个电机再协作,这太过于复杂。不算最复杂的双手,一台特斯拉最新第三代机器人的动作,完全靠约 30 个执行器完成。
你可以把执行器想象成机器人的肌肉,任何运动都是执行器把电能转换成动作的过程。这也是机器人最贵的部分,执行器占整个机器人 55% 的硬件成本。
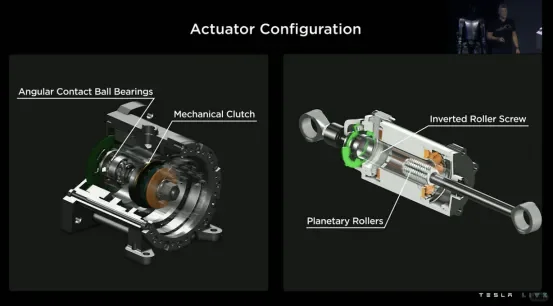
之前,几乎所有人形机器人的执行器都是旋转关节,用单个电机让手腕或者膝盖翻转,多个关节联动就能行走、抓取。这项技术路径明确,零件都是现成的:一个关节里,电机经减速器放大扭矩并带动轴承;编码器把运动反馈成电信号,力矩传感器监测载荷。但旋转关节有个致命弱点——没法干活,因为力量来自电机的扭矩,在人类体积下,扭矩有限,于是承重受限。
特斯拉改用直线关节:电机绕丝杠旋转,把旋转变成直线推拉,像拧螺丝。丝杠既当 “骨头” 也当 “肌肉”。普通丝杠摩擦大、精度差,业界在螺纹里加滚珠,把滑动摩擦变滚动摩擦,却仍撑不起所需重量。
工程师于是把滚珠换成数十根小螺杆,让它们环绕主丝杠滚动、自转,像行星绕太阳,既减摩擦又增加承载力,才满足直线关节的力量和精度要求。
这就是行星滚柱丝杠,目前特斯拉选定的供应商包括舍佛勒、新剑传动和北特科技。特斯拉在 2023 年展示,人形机器人腿部的直线执行器可以挂住半吨重的钢琴。
#机器人 #智能机器人 #人工智能替代人工 #科技前沿与未来 #人形机器人
机器人执行器有点像人的肌肉和关节,再加韧带腱鞘。
以下内容摘录自晚点团队的文章《 拆解特斯拉机器人供应链:30 多位从业者看到的泡沫和希望》
人体是人类科学目前无法企及的精妙设计。比如当你俯身抱起 20 公斤的大箱子,全身肌肉都会参与联动:力从脚底开始,脚踝关节微曲,让重心下沉,大小腿的肌群随即接管;腰腹部的深层核心肌肉锁住腰椎,防止损伤;当双手抱住箱子时,肩胛已经收紧,为手臂提供支点;起身则是腿和臀一同上蹬,将力量沿着躯干、肩胛送到前臂,让箱子平稳离开地面。而控制这一切,人的大脑基本都不太需要工作。
人形机器人不能像人一样装 600 多个电机再协作,这太过于复杂。不算最复杂的双手,一台特斯拉最新第三代机器人的动作,完全靠约 30 个执行器完成。
你可以把执行器想象成机器人的肌肉,任何运动都是执行器把电能转换成动作的过程。这也是机器人最贵的部分,执行器占整个机器人 55% 的硬件成本。
之前,几乎所有人形机器人的执行器都是旋转关节,用单个电机让手腕或者膝盖翻转,多个关节联动就能行走、抓取。这项技术路径明确,零件都是现成的:一个关节里,电机经减速器放大扭矩并带动轴承;编码器把运动反馈成电信号,力矩传感器监测载荷。但旋转关节有个致命弱点——没法干活,因为力量来自电机的扭矩,在人类体积下,扭矩有限,于是承重受限。
特斯拉改用直线关节:电机绕丝杠旋转,把旋转变成直线推拉,像拧螺丝。丝杠既当 “骨头” 也当 “肌肉”。普通丝杠摩擦大、精度差,业界在螺纹里加滚珠,把滑动摩擦变滚动摩擦,却仍撑不起所需重量。
工程师于是把滚珠换成数十根小螺杆,让它们环绕主丝杠滚动、自转,像行星绕太阳,既减摩擦又增加承载力,才满足直线关节的力量和精度要求。
这就是行星滚柱丝杠,目前特斯拉选定的供应商包括舍佛勒、新剑传动和北特科技。特斯拉在 2023 年展示,人形机器人腿部的直线执行器可以挂住半吨重的钢琴。
#机器人 #智能机器人 #人工智能替代人工 #科技前沿与未来 #人形机器人
