





种子+轮由元禾控股、复星锐正共同投资;
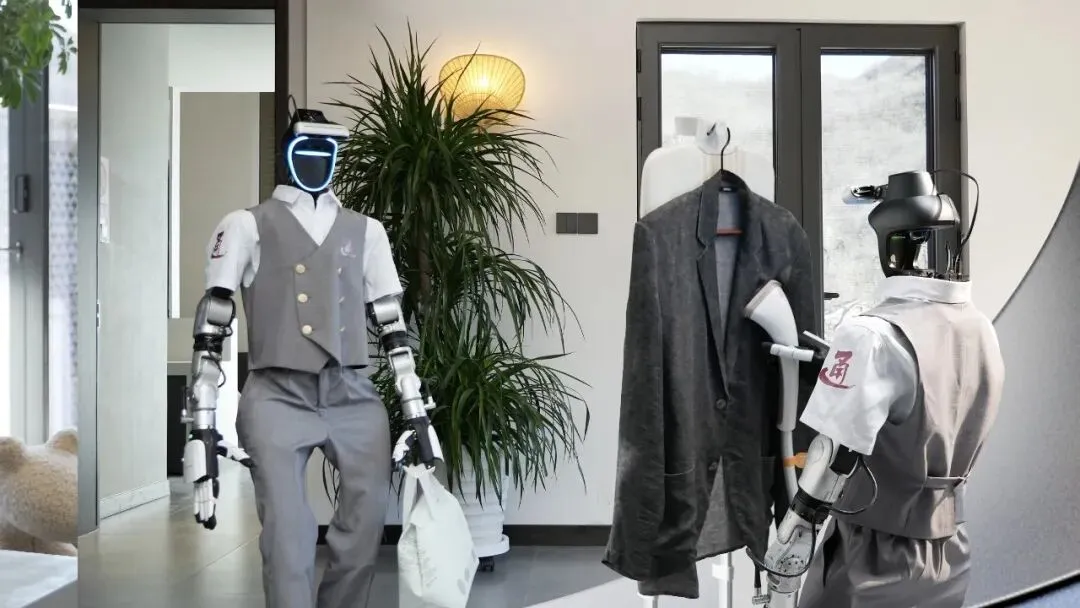
让双足人形机器人从“会跳舞”走向“真正干活”
德塔智能五大优势
聚焦在技术路线和产业推进


双足人形机器人需要具备 Loco-manipulation(全身协同操作)能力,也可进一步概括为"全身智能(Whole-Body Intelligence)",让机器人真正具备"边走边干活"的能力。德塔智能的人形机器人基础模型,从一开始便将机器人完整身体作为统一建模对象,围绕 Loco-manipulation 构建从 3D 场景理解、任务推理、全身控制到力位交互的完整模型闭环。


人形机器人完成真实世界任务,仅识别二维图像远远不够,更需要理解物体之间的三维空间关系、环境变化以及动作可能带来的影响。德塔智能自主研发的 3D 世界引擎,使机器人能够在执行动作前完成空间理解、环境建模和动作推演,从而更稳定地完成开门、搬运、分拣、巡检、质检等复杂任务。

优势三:决策、控制、力位控制协同闭环
在德塔智能的模型体系里,大脑负责场景理解、任务推理和动作决策,小脑将任务意图转化为全身多关节的连续控制,力位混合控制则帮助机器人在接触真实物体时兼顾位置精度、力反馈和身体稳定性。三者协同,解决的是机器人如何从“知道要做什么”,走向“在真实环境中稳定地把事情做成”。

优势四:全身全景数据采集
德塔智能已规模化部署全身全景数据采集设备,同步采集手、躯干、腿、脚以及环境交互等全身数据,为全身协同控制和长序列任务执行提供高质量数据支撑,并深度参与国内最大数据采集场建设。

德塔智能正通过与多家头部人形机器人本体厂商合作,在不同硬件和真实任务中持续验证模型能力,由此提升人形机器人基础模型的通用性,也让模型反过来参与本体设计、数据采集标准和场景落地流程的优化。


