灵巧手是集成驱动、传动、感知等多方面功能于一体的高精度末端执行器,能够在极限或者有害环境下替代人类进行复杂的操作任务,主要由驱动、传动、感知三大模块组成。
从运动学的观点看,人形机器人灵巧手需满足两个条件:指关节运动时能使物体产生任意运动、指关节固定时能完全限制物体的运动,这意味着人形机器人灵巧手至少要3个手指和9个自由度。
图表1:灵巧手结构主要分类

一、灵巧手占据整机价值量近20%,产业化拐点有望加速到来
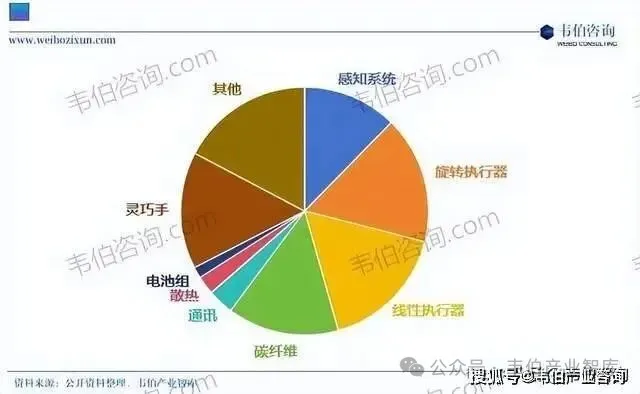
目前,业界将灵巧手视为解决人形机器人规模化落地应用“最后一厘米”的关键末端执行器,占据整机价值量接近20%。
图表1:整机价值量中灵巧手占比(%)
当前,灵巧手行业仍处于起步阶段,随着材料、电机、传动、运控、传感等技术的持续进步与提升,灵巧手实质性产业化的拐点有望加快到来。
数据显示,2024年,中国机器人灵巧手市场销量约0.57万只。预计到2030年,中国机器人灵巧手市场销量将有望突破34万只,2025-2030年CAGR约为90%。
图表2:2021-2030年中国灵巧手市场销量及预测(单位:万只)

二、独立集成商灵巧手企业及产品分布及销售情况
灵巧手独立集成商相较其他厂商整体更早推出成熟产品并且对外发售,其中:
国外厂商发展较早,但产品售价较高,国内厂商产品在自由度、核心部件设计、感知等层面各有特点,单价普遍介于5-10万元之间;国外以ShadowRobot为代表,其系列产品广受NASA等全球顶尖机构认可,但售价较为昂贵。
国内则以灵心巧手、因时机器人、帕西尼感知为代表,其中灵心巧手2024年产品一经推出就占据了国内高自由度灵巧手超80%市场份额,产品最高可达42自由度;因时机器人自主研发设计微型伺服电缸具备体积小、精度高、负载大、成本低等优势,2024年完成近2000台仿人五指灵巧手的交付。
图表3:独立集成商灵巧手企业及产品分布及销售情况

三、人形机器人本体灵巧手企业及产品分布及销售情况
目前,人形机器人本体厂商于近年推出自身本体产品后将研发重心拓展至灵巧手方向,且持续进行多自由度控制、结构设计、任务适用性等维度的迭代。
海外代表企业为特斯拉推出的Optimus,灵巧手已迭代至第三代,手部自由度由原来的11个增加至22个,采用腱绳驱动的三级传动结构将执行模组与手指末端连接,有效兼顾了重量与灵活性。
国内代表性厂商为智元、宇树、星动纪元、魔法原子等,其中,智元机器人2024年8月推出的19自由度视触觉灵巧手集成了高精度的MEMS触觉感知和视触觉感知技术,提升抓取、操作等任务中的精度和效率的同时为其在复杂环境中的自主决策和适应性提供了有力支持。
宇树科技推出的Dex5-1灵巧手通过全关节反驱+丰富触觉传感器设计,指尖重复定位精度达±1mm,适合复杂曲面抓握任务。魔法原子主打高控制精度与高负载能力,通过自研关节模组和力位混合控制算法,MagicHandS01力分辨率最高可达0.1N可实现双指精细操作,满足如拧螺丝等工业高精度作业需求。
图表4:人形机器人本体灵巧手企业及产品分布及销售情况

更多关于灵巧手行业的全面数据和深度研究,请查看韦伯咨询最新发布的
《2026年中国灵巧手行业专题调研与深度分析报告》。