
摘要:本报告针对灌装码垛生产线的SolidWorks(以下简称SW)三维建模设计过程进行全面阐述,涵盖生产线整体布局规划、核心设备零部件建模、装配体设计、干涉检查及仿真验证等关键环节。本次设计以全自动灌装码垛生产线为对象,结合食品饮料行业的生产需求,通过SW软件完成从单个零部件到整体生产线的三维建模,实现生产线结构可视化、装配合理性验证及运动仿真分析,为生产线的实际制造、安装调试及后期优化提供可靠的数字化支撑。设计结果表明,所建立的三维模型结构完整、参数合理,各设备协同运作顺畅,满足生产线自动化、高效化的设计要求,可有效缩短实际生产周期,降低设计与制造成本。
一、设计概述
1.1 设计背景
在现代制造业向自动化、智能化转型的趋势下,灌装码垛生产线作为食品、饮料、化工等行业的核心生产设备,其设计合理性直接影响生产效率、产品质量及生产成本。传统的二维设计方式存在直观性差、装配干涉难以提前发现、设计迭代效率低等弊端,已无法满足复杂生产线的设计需求。SW三维建模技术凭借其强大的实体建模、装配设计及仿真分析功能,能够将抽象的设计方案转化为直观的三维模型,提前排查设计缺陷,优化结构布局,成为现代生产线设计的核心工具。本次设计针对全自动灌装码垛生产线,通过SW软件完成全流程三维建模,解决传统设计中的痛点,为生产线的实际落地提供技术支持。
1.2 设计目标
本次灌装码垛生产线SW三维建模设计的核心目标的如下:一是完成生产线整体布局的三维建模,涵盖上料系统、灌装系统、封口检测系统、输送系统及码垛系统五大核心模块,确保各模块布局合理、衔接顺畅;二是完成各核心设备的零部件建模,保证零部件结构尺寸精准、符合实际生产标准,满足强度及装配要求;三是完成整个生产线的装配体设计,进行干涉检查,排除装配过程中的结构冲突;四是通过运动仿真,验证生产线各设备的协同运作可行性,优化运动参数,确保生产线运行稳定、高效;五是生成详细的工程图纸,为零部件加工、设备安装及后期维护提供依据,最终实现生产线数字化设计与可视化管理。
1.3 设计范围与工具
本次设计范围涵盖全自动灌装码垛生产线的全部核心设备,包括上料机、灌装机、封口机、检测装置、输送带及码垛机器人等,涉及零部件建模、装配设计、干涉检查、运动仿真及工程图生成等全过程。设计工具采用SolidWorks 2023版本,该软件具备强大的实体建模、草图绘制、装配约束及运动仿真功能,能够高效完成复杂零部件的建模与装配,精准排查装配干涉,模拟设备实际运动状态,为设计优化提供可靠支撑。同时辅助使用AutoCAD软件进行工程图标注优化,确保图纸符合机械设计标准。
二、生产线整体布局规划
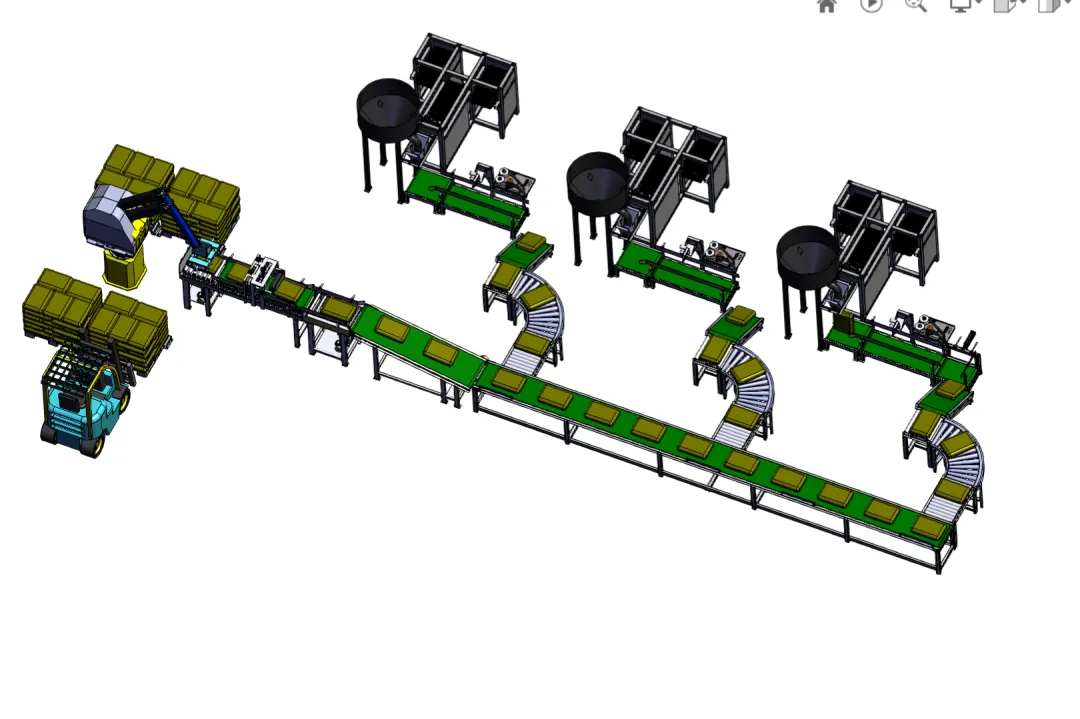
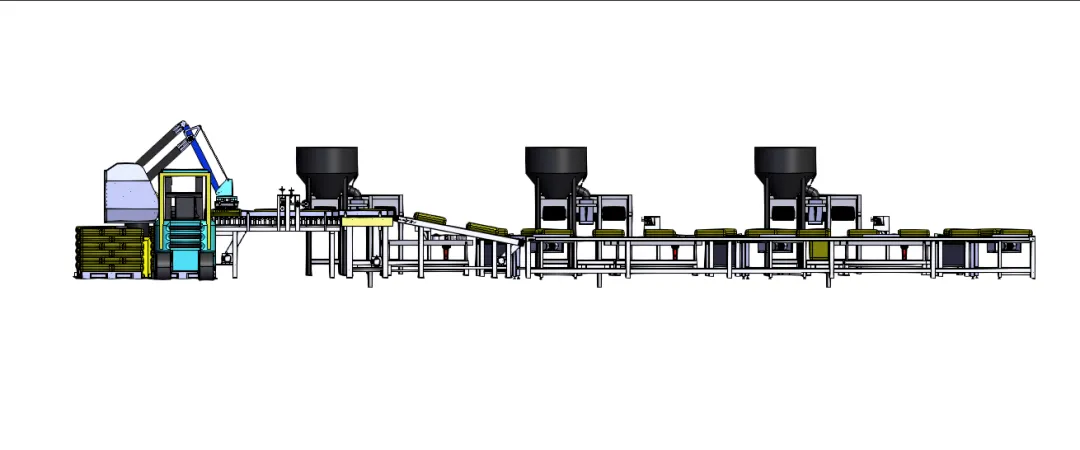
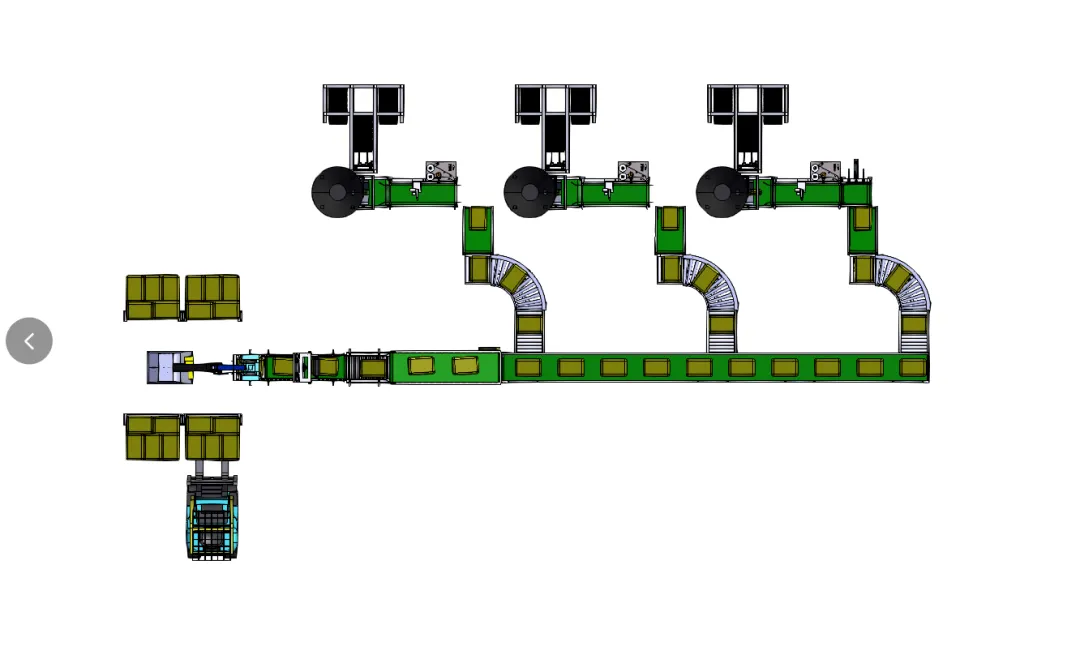
灌装码垛生产线的整体布局需遵循“流程顺畅、空间合理、操作便捷、高效节能”的原则,结合生产工艺要求,明确各核心模块的位置及衔接关系,为后续三维建模奠定基础。本次设计的灌装码垛生产线采用直线型布局,整体流程分为上料→灌装→封口检测→输送→码垛五个核心环节,各模块依次衔接,避免物料输送过程中的迂回,提高生产效率。
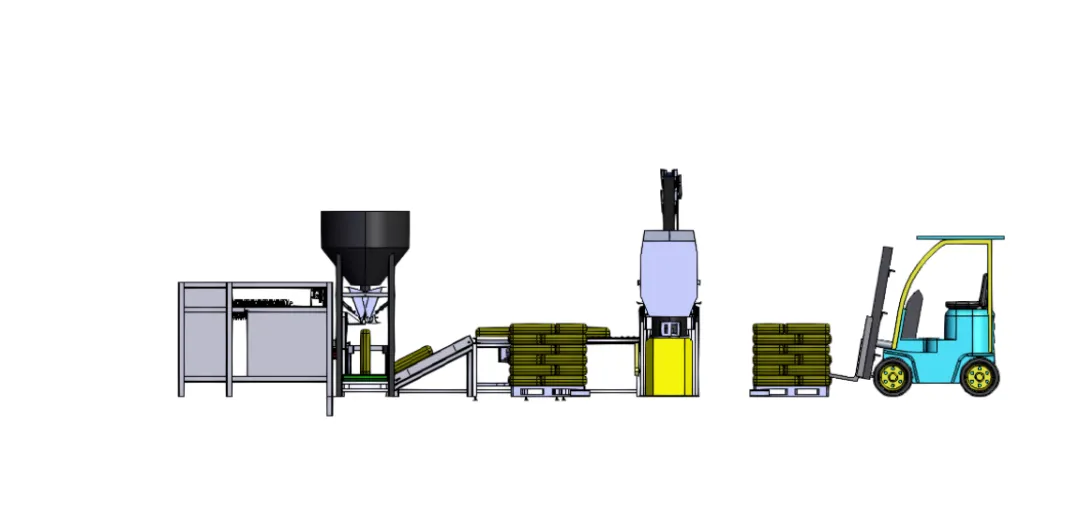
具体布局规划如下:上料系统位于生产线最前端,采用泵送系统+储罐结构,用于液体物料的自动补给,与灌装机进料口精准对接,确保上料速度与灌装速度匹配,设计冗余量20%以上,避免出现生产瓶颈;灌装机位于上料系统后方,采用全自动灌装模式,根据液体物料特性设计灌装阀结构,确保灌装精度±0.5%,灌装速度可达500~3000瓶/小时;封口检测系统紧随灌装机之后,集成热封口机与视觉检测装置,完成物料封口后,通过检测装置排查封口不严密、缺件等不合格产品,自动剔除不合格品;输送系统采用皮带输送带,贯穿整个生产线,将灌装封口后的成品平稳输送至码垛区域,输送带速度可根据生产节奏灵活调节;码垛系统位于生产线末端,采用关节机器人+真空吸盘夹具,实现成品的自动抓取与堆叠,码垛速度可达5~15次/分钟,支持多种垛型堆叠,满足仓储运输需求。
在布局规划过程中,通过SW软件的草图绘制功能,绘制生产线整体布局草图,标注各设备的尺寸参数、安装位置及间距,确保各设备之间的衔接精准,预留合理的操作与维护空间,同时兼顾生产线的整体美观性与实用性,为后续各设备的建模与装配提供依据。
三、核心设备SW三维建模过程
本次三维建模采用“先零部件、后装配体”的思路,依次完成各核心设备的零部件建模,再按照布局规划进行装配,确保建模过程有序、高效,模型精准度符合设计要求。
3.1 零部件建模
零部件建模是三维设计的基础,需根据各设备的结构特点、尺寸参数及功能要求,采用SW软件的实体建模功能,完成单个零部件的设计。本次建模的核心零部件包括灌装机的灌装阀、输送带的滚筒与支架、码垛机器人的臂体与末端夹具、上料系统的储罐与输送管道等。
在零部件建模过程中,首先根据设计图纸的尺寸参数,利用SW的草图绘制工具,绘制零部件的二维草图,严格控制尺寸精度,确保草图与设计要求一致;然后通过拉伸、旋转、扫描、切除等实体建模命令,将二维草图转化为三维实体,针对复杂结构(如灌装阀的密封结构、码垛机器人的关节结构),采用特征编辑功能,优化结构细节,确保零部件的结构合理性与功能可行性。例如,灌装机灌装阀的建模的,需重点关注密封面的精度,采用旋转特征绘制阀体内腔,通过拉伸特征制作阀芯,确保阀芯与阀体内腔的配合间隙合理,避免灌装过程中出现泄漏;码垛机器人末端夹具采用真空吸盘结构,建模时需准确绘制吸盘的形状与尺寸,确保吸盘与成品的接触面积合理,满足抓取稳定性要求。
同时,为提高建模效率,对于标准化零部件(如螺栓、螺母、轴承等),直接调用SW软件自带的标准件库,避免重复建模,降低设计工作量;对于非标准化零部件,建立专属零件库,便于后续设计迭代与修改。建模完成后,对每个零部件进行尺寸检查与结构优化,确保零部件的尺寸误差控制在允许范围内,结构强度满足实际使用要求。
3.2 装配体设计
在完成所有核心零部件建模后,按照生产线整体布局规划,利用SW软件的装配设计功能,依次将各零部件装配成完整的设备,再将各设备装配成整个灌装码垛生产线装配体。装配过程中,核心是合理设置装配约束,确保各零部件的相对位置准确,运动关系符合实际工作要求。
装配约束的设置遵循“先基准、后部件”的原则,首先确定装配基准面(如地面、设备底座),将各设备的底座固定在基准面上,确保设备安装稳固;然后根据各零部件的装配关系,设置重合、平行、垂直、同心等约束条件,例如,输送带的滚筒与支架之间设置同心约束,确保滚筒能够灵活转动;灌装机的灌装阀与进料管道之间设置重合约束,确保物料输送顺畅;码垛机器人的臂体与底座之间设置旋转约束,实现臂体的灵活转动。
在装配过程中,实时进行干涉检查,利用SW软件的干涉检查功能,排查各零部件之间、各设备之间的结构冲突,一旦发现干涉问题,及时调整零部件的尺寸或装配位置,确保装配体结构合理,无干涉现象。例如,在码垛机器人与输送带的装配过程中,发现机器人臂体运动时与输送带支架存在干涉,通过调整机器人的安装位置与臂体运动轨迹,解决干涉问题,确保机器人能够正常完成抓取与码垛动作。同时,对装配体进行配合间隙检查,确保各运动部件的配合间隙合理,避免出现卡滞现象,保证设备运行顺畅。
四、仿真验证与设计优化
三维建模与装配完成后,通过SW软件的运动仿真功能,对灌装码垛生产线的整体运行状态进行仿真验证,模拟实际生产过程中的设备运动,排查设计缺陷,优化设计方案,确保生产线能够稳定、高效运行。
4.1 运动仿真设置
运动仿真以生产线的实际工作流程为依据,设置各设备的运动参数与运动顺序,模拟上料、灌装、封口检测、输送、码垛的全流程运动。首先,为各运动部件添加运动驱动,例如,输送带的滚筒添加旋转驱动,设置旋转速度与实际生产速度一致;灌装机的灌装阀添加直线驱动,模拟灌装与复位动作;码垛机器人的臂体与末端夹具添加旋转与直线驱动,模拟抓取、移动、堆叠等动作。然后,设置仿真时间与步长,确保仿真过程能够完整模拟生产线的一个工作周期,步长设置合理,避免仿真卡顿或精度不足。
4.2 仿真结果分析与优化
仿真运行完成后,对仿真结果进行全面分析,重点关注各设备的运动协调性、动作准确性及运行稳定性。通过仿真发现,灌装机的灌装速度与输送带的输送速度存在轻微不匹配,导致部分成品在输送过程中出现偏移;码垛机器人的抓取动作存在延迟,影响码垛效率;同时,上料系统的物料输送速度波动较大,影响灌装精度。针对以上问题,进行针对性优化:调整输送带的输送速度,使其与灌装机的灌装速度保持同步;优化码垛机器人的运动参数,缩短抓取动作的延迟时间,提高码垛速度;改进上料系统的输送管道结构,增加稳压装置,稳定物料输送速度,提高灌装精度。
优化完成后,再次进行运动仿真,验证优化效果。经过多次仿真与优化,生产线各设备的协同运作顺畅,灌装精度、输送稳定性及码垛效率均达到设计要求,无卡滞、干涉等问题,仿真结果符合实际生产需求。同时,通过SW软件的应力分析功能,对码垛机器人臂体、输送带支架等关键受力部件进行应力分析,确保部件的强度满足实际工作要求,避免长期运行过程中出现损坏。
五、工程图生成
三维模型与仿真验证完成后,利用SW软件的工程图功能,将三维模型转化为二维工程图纸,为零部件加工、设备安装及后期维护提供依据。工程图生成过程中,严格遵循机械设计制图标准,确保图纸的规范性与可读性。
首先,根据零部件与装配体的结构特点,选择合适的视图角度,生成主视图、俯视图、左视图及必要的剖视图、局部放大图,确保图纸能够清晰展示零部件的结构尺寸、装配关系及关键细节;然后,进行尺寸标注,标注各零部件的关键尺寸、公差范围及装配间隙,确保尺寸标注准确、完整,公差符合实际生产要求;同时,添加技术要求,明确零部件的材料、加工工艺、装配要求及维护注意事项,确保加工与装配过程有章可循。
工程图生成后,进行严格检查,排查尺寸标注错误、视图缺失、技术要求不明确等问题,确保工程图纸能够准确反映三维模型的结构与设计要求,满足零部件加工与设备安装的实际需求。同时,将工程图导出为PDF格式与DWG格式,便于后续查阅、修改与使用。
六、设计总结与展望
6.1 设计总结
本次灌装码垛生产线SW三维建模设计,严格按照设计目标与流程,完成了生产线整体布局规划、核心设备零部件建模、装配体设计、运动仿真验证及工程图生成等全部工作。通过本次设计,成功建立了灌装码垛生产线的完整三维模型,实现了生产线的数字化可视化,提前排查并解决了传统设计中可能出现的装配干涉、运动不协调等问题,优化了生产线的结构布局与运动参数,确保生产线能够稳定、高效运行。
本次设计的亮点在于,结合SW软件的强大功能,实现了从零部件到整体生产线的全流程数字化设计,减少了传统二维设计的误差,提高了设计效率,缩短了设计周期;同时,通过运动仿真与应力分析,确保了设计方案的合理性与可行性,为生产线的实际制造、安装调试提供了可靠的数字化支撑。与传统人工生产线相比,本次设计的全自动灌装码垛生产线可将人工数量从8人/班减少至2~3人/班,产能提升125%以上,显著降低人工成本,提高生产效率。
本次设计也存在一定的不足:部分复杂零部件的建模精度仍有提升空间,运动仿真的细节模拟不够全面,后续可进一步优化建模方法,完善仿真设置,提高设计质量。
6.2 设计展望
随着智能制造技术的不断发展,灌装码垛生产线的数字化、智能化水平将不断提升。后续可基于本次三维模型,结合工业物联网、大数据等技术,实现生产线的远程监控、故障预警及智能调度,进一步提高生产线的运行效率与智能化水平;同时,可对三维模型进行参数化设计,建立参数化模型库,便于后续根据不同的生产需求,快速调整设计参数,实现生产线的个性化设计与快速迭代。此外,可将三维模型与数字孪生技术结合,构建生产线的数字孪生体,实现物理生产线与数字生产线的实时联动,为生产线的优化升级提供更加强有力的技术支持。
本次设计为灌装码垛生产线的数字化设计提供了可行的方案与思路,对同类生产线的设计具有一定的参考价值,能够推动制造业自动化、智能化的发展,为企业降低生产成本、提高生产效率提供有力支撑。
通过网盘分享的文件:灌装码垛生产线.zip
链接: https://pan.baidu.com/s/1QnY_VUwbwtGSrYGOSlTk-Q?pwd=v7rn 提取码: v7rn
--来自百度网盘超级会员v1的分享
