


邹明哲李焕锋 沙杰牛泳博孙玮隆
沙杰牛泳博孙玮隆
(河南工业大学机电工程学院)
DOI:10.3969/j.issn.1000-7008.2025.12.014
点击文末“阅读原文”获取免费pdf
摘 要针对传统加工生产线中可视化系统数据与虚拟场景相结合问题,提出数字孪生可视化系统框架,通过生产线三维可视化场景搭建、机器人通信功能开发,营造虚拟空间中的沉浸式场景,实现物理实体与虚拟模型的虚实场景交互。基于Unity3D开发出生产线可视化系统,实现虚拟场景中的场景漫游、人机交互和数据可视化,通过实验验证,生产线可以达到虚实同步的要求,在运行过程中数据实时更新于开发的可视化界面上,实现可视化系统中数据与场景的结合。 关键词数字孪生;虚实交互;Unity3D;沉浸式场景 1引言
工业4.0的推进加速了智能制造技术的发展,智能制造充分融合了信息技术、自动化技术、人工智能等。而数字孪生[1]作为一种数字化、智能化技术,正在越来越多地应用于智能制造实际生产中。 目前众多学者在车间生产过程监控、机加工生产线三维可视化等方面已有许多研究。殷民艇等[2]设计了基于Unity3D的机床加工系统,完成系统的动画效果与UI交互控制,实现机床加工方式介绍以及交互式机床演示等功能;张南等[3]利用数字孪生技术对车间生产过程监控方法进行研究,实现车间生产作业过程的三维虚拟可视化及实时动态交互;张晓萍等[4]对灌装生产线监控硬件平台、控制系统和数据处理方法进行研究,实时处理多源异构数据,采用GE PAC可编程控制器和iFIX组态软件,开发了基于数字孪生的灌装生产线动态实时可视化监控系统;冯诚能等[5]采用数字孪生技术对数控机床运行监测系统进行了设计与开发,能以二维图表的形式监测机床的运行数据;吴琦等[6]提出一种数字孪生驱动的车间物流配送实时监控方法,对车间虚拟建模技术、车间物流实时状态信息处理等关键技术进行了研究。 上述研究对生产线多设备数据集成、生产过程信息可视化、机床运行监测等问题进行了分析与探索。在工业上对数字孪生应用的研究主要集中在车间的宏观调度层面,对生产过程的可视化、可视化系统中数据与三维模型的结合研究较少。基于上述问题,本文设计了一种基于数字孪生的加工生产线可视化系统,对三维虚拟生产线场景搭建、生产线多设备实时数据交互、实时数据显示等问题展开研究[7]。 2生产线数字孪生可视化系统框架设计
数字孪生本质上是一种双向的虚实映射,通过孪生数据对物理实体和虚拟模型实现双向驱动,建立通信系统,将实体生产线与虚拟生产线相连接,利用虚实交互技术,设计面向实际生产的数字孪生可视化系统,对工业制造与生产管控的信息智能化提供一定帮助。 本文以盘类零件加工生产线为对象,应用数字孪生技术设计了一条孪生线,此孪生线由仓储库、输送带、变位机和加工中心等单元组成,为使生产线结构紧凑,采取U字型生产线结构,中枢为机器人,能够完成零件的加工、装配、入库。在可视化系统中,实现生产线与数据的可视化、营造沉浸式场景时,需要保证模型的质量,为了提高可视化效果[8],在构建虚拟场景时需要从不同的角度出发,完成模型的优化、生产线的布局、场景的转换,最终搭建出趋近于真实渲染的可视化场景,进一步完成数据的可视化效果。本文提出的产品装配线数字孪生可视化系统框架由实体层、虚拟层、数据层、应用层四部分组成,如图1所示。 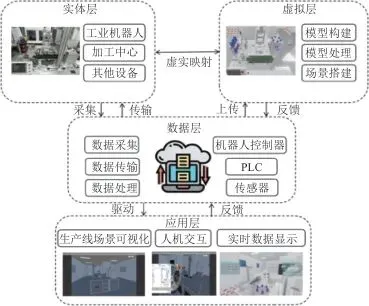
本文研究的可视化场景的优化设计着重于虚拟场景中模型高保真还原,虚拟场景中的模型由实体层构建而来,实体层是现实环境中的生产线,是数字孪生系统的搭建基础。虚拟层则是根据实体层中真实生产线设备的外形结构建模,为了使模型具有实体属性,原始模型构建完成后需要进行优化处理,包括模型的渲染、材质的处理等操作,使可视化场景更加真实美观[9]。数据层由实体层和虚拟层中设备产生的数据构成,是实体层与虚拟层之间虚实映射的桥梁。孪生数据在系统中采集与传输,处理好的数据被用来实时驱动虚拟场景,连接实体层与虚拟层,保证虚实场景能够同步运行。对于此加工生产线,结合可视化系统的实际用户需求,虚拟实体并不满足于在没有场景空间的单一模型中运行,所以在虚拟层中要相对于原始模型提高模型的优化程度并完成场景搭建,此外数据的显示也是直接提升用户体验的关键,通过多源异构数据处理,基于人机交互友好性设计界面,使用户所需数据实时清晰地显示于生产线运行界面中。 依据上述框架,本文在开发数字孪生可视化系统时,考虑到操作系统的兼容性,以Unity3D引擎作为主要工具,作为虚拟现实平台,它可应用于不同的操作系统且支持多平台,通过Unity生态系统大量的插件和丰富的资源搭建可视化场景[10],同时Unity3D的组件化设计可以根据用户需求增加新功能和模块。应用Visual Studio编写C#代码,将代码导入Unity3D平台上的Scripts包中,C#代码在平台中辅助界面设计、人机交互、数据显示等功能设计[11],使所开发的应用程序功能完善。利用预制件功能管理不同功能的代码脚本,将平台中的模型、场景及代码等单元集成于应用程序中,将开发的应用程序与实体设备连接,实时反映生产线的实际运行情况,使生产线动态可视化[12]。 3生产线三维虚拟场景搭建
生产线的三维模型是对实体属性的反映,其对可视化的效果有很大的影响,同时模型的质量也影响着数字孪生可视化系统与用户的交互性,根据对系统的整体设计规划,进行孪生体的构建[13]。孪生体构建流程如图2所示。 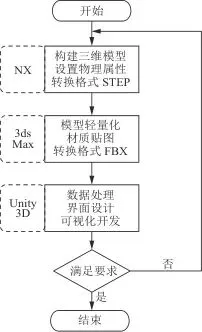
对于创建好的加工生产线模型,经过STEP格式转换,可导入3ds Max中进行模型优化处理,优化后的模型再经FBX格式转换,导入Unity3D中进行可视化场景搭建。在3ds Max中利用高质量的渲染引擎对模型进行优化处理,包括对模型进行材质和贴图处理,根据实体设备的材质属性对创建好的模型增添材质,增强模型的可视化效果,导入到3ds Max中的模型多边形数量庞大,应有效降低模型多边形数量,因此对网格模型进行简化操作,轻量化处理后的模型仍可以满足实时交互、实时更新的要求,模型能够快速显示且运行更加流畅。 创建好的模型只是单一的生产线模型,不具有空间属性,需为模型添加空间场景。其目的是加强生产线运行过程的真实性,使模型不仅能在数据的驱动下运行,还能在趋近于真实的沉浸式场景中符合现实规律运行。模型对比如图3所示。 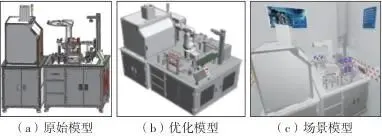
使用UG NX模拟生产线运行过程时模型的数据透明化程度较低,对上述模型优化处理操作后将模型导入Unity3D中,通过对比发现,在Unity3D中搭建好场景后的虚拟空间更加真实,在场景中可以对交互功能进行研究与设计。 Unity3D可以使模型和数据可视化,提供沉浸式的用户体验和实时的监控分析。通过这种整合,能够在数字环境中进行真实的生产线场景可视化。单一模型不利于构建可视化系统,所以在Unity3D中需要进行场景搭建,通过格式转换将模型导入搭建的场景中,展现真实的生产线设备运行状态。在Unity3D中搭建的空间虚拟场景不具有实体层的属性,为了提升场景的真实感和视觉效果,以营造沉浸式场景,在车间中根据场景布置、调整光源,以区域光源搭配点光源照亮场景,确保光源大小与实际灯具相符,增加光照的均匀性。通过Unity3D中的Lighting组件选择baked模式进行灯光烘焙,调整光源的强度和颜色,确保与车间环境相符,以便用户可以清楚地看到生产线细节和运行过程。根据设备的实际布局和要求,在Unity3D场景中摆放和组织模型,尽可能做到实体层的高保真还原,营造沉浸式场景,使用Unity3D的场景视图和层次视图来管理场景的结构,灯光烘焙效果如图4所示。通过搭建虚拟场景为后续设计交互元素,如按钮、漫游、实时数据可视化等做准备。 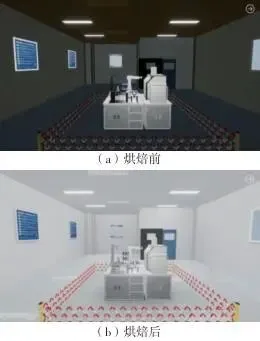
4机器人数据可视化
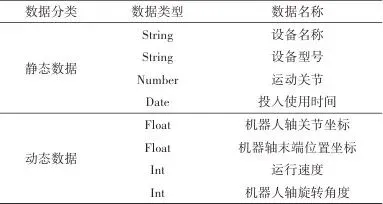
孪生数据是数字孪生系统中关键的一环,是虚拟模型和物理实体虚实交互的基础。本文基于U字型加工生产线结构,选取ABB IRB120型号机器人,其敏捷、紧凑、轻量的特点适配于本文生产线。以机器人为例,分散的数据不能让用户直观了解生产线的同步运行信息,通过数据处理实现数据可视化,使所需孪生数据在可视化场景中可以实时更新。 机器人数据包括静态数据与动态数据,机器人型号、尺寸等属于静态数据,机器人6个轴的角度、速度、加速度、机器人末端位置等属于动态数据,ABB机器人数据如表1所示。 表1ABB机器人数据
实体机器人与Unity的通信技术路线如图5所示,采用Robot Web Services协议,基于Web服务架构,和ABB机器人之间的消息由XML和JSON组成,具有较好的跨平台性和通用性,ABB机器人与PC端之间的通信通过工业以太网接口完成。在Unity中编写C#代码,设置布尔类型的静态变量,用于控制机器人的远程通信配置、连接状态管理等功能。创建float类型数组和string类型数组,用于存储机器人关节角度信息、笛卡尔坐标信息和用来表示机器人姿态的四元数,其初始值为0。查询实体机器人IP地址用于XML格式的通信,检测到与ABB机器人连接后,启用两个后台线程分别读取ABB机器人的XML和JSON数据。它利用多线程机制,确保在主线程运行时异步获取和处理机器人的实时数据,同时通过状态机管理程序的不同操作状态,将采集到的数据传输到创建的变量中用来实时更新[14 - 15],Unity3D中的Update组件通过帧更新的方法实现实时变换。 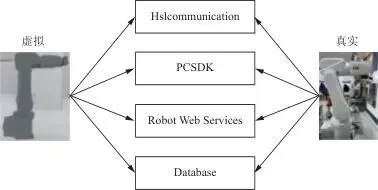
以NX中机器人数据的显示为例,其数据显示于冗长的表格中,不利于用户及时查询所需数据,大量不常用数据的堆叠使用户的体验感降低,数据显示的效果也亟待提高,在Unity3D中可以根据用户需求,提取用户所需要的较常用关键数据,使精简数据集中显示于界面上,相比于传统建模软件,可视化效果有很大的提升,用户也可以在设备运行过程中及时了解生产线状态信息。在ABB机器人示教器中,有两种机器人数据的显示界面,分别显示6个轴的旋转角度、坐标中的位置及用于表示三维空间中旋转的四元数,如图6所示。 
这些数据是用户了解机器人运行状态的关键数据,为实现设备运行过程动态展示数据的可视化场景,根据需求进行数据显示界面设计。数据框要求简洁明了,所需数据清楚地显示于表格中;数据框要调整为半透明状态,使可视化场景有更好的观感。应用Unity中的UGUI组件,将上述采集到的机器人数据以Text形式对应显示于所设计的界面中,使数据在可视化场景中实时更新,设计前后的数据对比如图7所示。 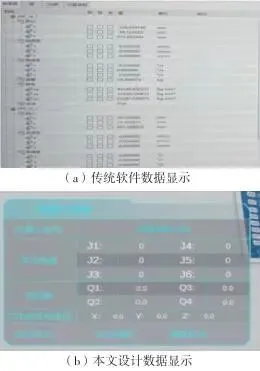
5可视化系统开发与验证
综上所述,可视化系统的开发步骤:(1)模型构建,在不同的软件中进行装配线模型的创建、优化,确保所有设备和组件的准确性;(2)可视化场景搭建,将模型导入Unity3D,设置场景布局、灯光烘焙,确保视觉效果符合需求;(3)孪生数据处理,通过编写C#代码,将实时数据传输到Unity3D中;(4)UI界面设计,使用Unity3D中UI组件设计界面、控制面板等,显示实时数据和状态;(5)人机交互功能,设计并实现交互功能,点击查看详细数据、场景漫游、虚拟仿真等;(6)数据可视化,集成图表和实时数据展示工具,结合设备运行过程动态展示生产线信息。 为了实现可视化系统中各设备信息的映射,需要使实体生产线与虚拟场景进行数据交互,产品装配线通过以太网、工业交换机、远程I/O模块的方式与实体机器人、旋转供料、立体仓库、加工中心等工位的设备进行连接,形成系统的通信网络,再通过采集、处理和传输,将实体设备中的数据映射到Unity3D可视化场景中,驱动虚拟实体运行,实现虚实交互。根据上述对ABB机器人的数据处理过程,以Unity3D 2020.3.48为平台验证系统的虚实同步,实体机器人与虚拟机器人的位姿对比如图8所示。 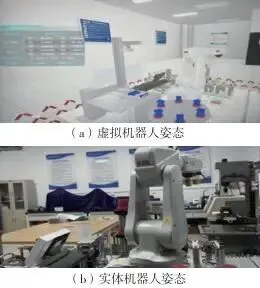
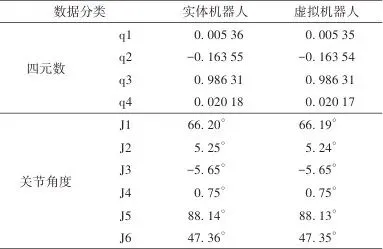
通过图8可以看出,虚拟机器人与实体机器人所处位置几乎相同,手动操作示教器时,虚拟机器人可以同步实体机器人实时运行,对比表2的虚实交互数据发现,虚体与实体之间还存在着微小差距,试验结果表明本文所设计系统基本可以达到虚实同步的要求。 表2虚实交互数据验证
进行UI设计时应先对功能需求进行分析。进入监控系统需要在登录界面输入用户名及密码,从而使监控系统更加规范化并保护系统内数据,借助Unity中的UI组件设计界面,如图9所示。UI中的Button组件是实现交互的关键,在对其配置前需进行逻辑分析,为方便管理,使用C#配置UI管理脚本程序,将创建好的功能节点写入程序并上传至Unity3D,通过Button组件中的On click()选项挂载各功能节点实现界面及场景的跳转。 
场景漫游功能基于C#脚本实现,在沉浸式场景中,通过鼠标和键盘操作可以让用户查看监控系统中的不同区域和设备。通过漫游,用户可以像在现场一样巡视各个角落,检查设备的运行状态和环境条件。通过设备认知功能,使用者可以了解每个工位上设备的参数,从而更加熟悉生产线,如图10所示。通过对机器人与Unity3D的通信开发,可在Unity中对机器人及生产线其他设备的运动进行控制,实现运动仿真功能。 
客户端获取到生产线运行多源异构数据后,在Unity3D引擎中对实时数据进行可视化场景界面开发,实现模型的实时驱动需要用到Update方法,此方法会被引擎定时调用,以更新模型状态。根据客户端接收到的实时数据,在Update方法中动态更新模型,根据机器人速度、加速度、力矩,加工中心及生产线其他信息的参数,对实时数据显示界面进行设计,通过C#脚本控制各参数数据实时更新,即实现数据的交互,使虚拟环境中的模型真实反映实体生产线的运行状态。设计状态显示面板如图11所示,输入IP地址与实体设备进行连接,实现虚实同步运行,生产线中的重要数据实时显示于界面上,有利于使用者了解设备的运行状态。 
6结论
对基于数字孪生的加工生产线可视化场景设计进行了研究,提出了数字孪生可视化系统框架。构建生产线的三维模型,通过3ds Max完成模型的材质、贴图、轻量化处理并对模型进行优化;在Unity3D中导入模型进行可视化场景搭建和优化设计,开发ABB机器人通信功能,实现数据的采集、处理与传输。经实验验证,虚实场景交互可以满足虚实同步的要求,对UI及交互功能进行设计,将可视化系统与三维模型结合,实现场景漫游、实时数据可视化等功能,使数据显示更加友好,结合设备运行过程动态展示生产线信息,提高管理效率。 
1.Grieves W M. Product lifecycle management: The new paradigm for enterprises[J]. International Journal of Product Development, 2005, 2(1/2): 71 - 84.
2.殷民艇, 董磊, 张星, 等. 基于Unity3D的机床加工系统设计与实现[J]. 制造技术与机床, 2022(5): 164 - 168.
3.张南, 张顺, 刘利勋, 等. 基于数字孪生的车间生产过程监控方法[J]. 组合机床与自动化加工技术, 2022(7): 156 - 159.
4.张晓萍, 窦金生, 宋天麟, 等. 基于数字孪生的生产线监控系统研究[J]. 包装与食品机械, 2022, 40(4): 73 - 78.
5.冯诚能, 李亮, 陈妮, 等. 基于数字孪生的数控机床运行监测系统设计与开发[J]. 工具技术, 2024, 58(2): 105 - 109.
6.吴琦, 张胜文, 国明义, 等. 数字孪生驱动的车间物流可视化监控方法[J]. 机床与液压, 2023, 51(22): 120 - 126, 131.
7.周成, 孙恺庭, 李江, 等. 基于数字孪生的车间三维可视化监控系统[J]. 计算机集成制造系统, 2022, 28(3): 758 - 768.
8.徐健, 赵一剑, 刘高峰, 等. 基于数字孪生的工业机器人建模及监测方法[J]. 西安工程大学学报, 2024, 38(2): 124 - 133.
9.王进峰, 问丛川, 花广如, 等. 基于Unity3D的数控机床数字孪生系统设计与实现[J]. 中国工程机械学报, 2023, 21(5): 443 - 448.
10.蔡兴旺, 裴耀强, 杨继华, 等. 煤矿掘进机系统数字孪生技术研究[J]. 系统仿真学报, 2024, 36(10): 2455 - 2468.
11.杜莹莹, 罗映, 彭义兵, 等. 基于数字孪生的工业机器人三维可视化监控[J]. 计算机集成制造系统, 2023, 29(6): 2130 - 2138.
12.王义军, 陈旭, 张志斌, 等. 基于数字孪生的桥式起重机智能健康管理系统设计[J]. 机械设计, 2024, 41(S2): 61 - 65.
13.蒋宝山, 盛步云, 秦超朋, 等. 某机加工生产线3D虚拟监控系统设计与研发[J]. 现代制造工程, 2023(6): 101 - 106, 131.
14.黄涵钰, 毛柯夫, 苑明海, 等. 数据驱动的生产线数字孪生系统构建与应用[J]. 制造技术与机床, 2024(2): 67 - 74.
15.郑苏芮, 杨德生, 张昕, 等. 数字孪生驱动的堆垛机模型可视化设计与实现[J]. 现代制造工程, 2024(7): 109 - 116.

Design and Implementation of Visualization System for Production Line Based on Digital Twin
Zou MingzheLi Huanfeng Sha JieNiu YongboSun Weilong
Sha JieNiu YongboSun Weilong
Abstract: The objective of this study is to address the challenge of integrating the data from a visualisation system and a virtual scene within the conventional processing production line. To this end, a digital twin visualisation system framework has been proposed, which aims to create an immersive scene in a virtual space. This is to be achieved by constructing a three-dimensional visualisation of the production line and developing a robot communication function. The ultimate goal is to facilitate interaction between physical entities and virtual models within the virtual scene. A production line visualization system has been developed based on Unity3D. This system enables scene roaming, human-computer interaction and data visualization in the virtual scene. Experimental verification demonstrates that the production line is capable of meeting the requirements of virtual-real synchronization. Furthermore, the data is updated in real time on the developed visualization interface during the operation of the production line. This allows for the combination of the data and the scene in the visualization system. Keywords: digital twin;virtual real interaction;Unity3D;immersive scene 
引用本文:邹明哲,李焕锋,沙杰等.基于数字孪生的生产线可视化系统设计与实现[J].工具技术,2025,59(12):109-114.(Zou Mingzhe,Li Huanfeng,Sha Jie,et al.Design and Implementation of Visualization System for Production Line Based on Digital Twin[J].Tool Engineeing,2025,59(12):109-114.)
第一作者:邹明哲,硕士研究生,河南工业大学机电工程学院,450001 郑州市
通讯作者:李焕锋,教授,河南工业大学机电工程学院,450001 郑州市
中图分类号:TG702; TH18
文献标志码:A
邹明哲李焕锋沙杰牛泳博孙玮隆
(河南工业大学机电工程学院)
DOI:10.3969/j.issn.1000-7008.2025.12.014
点击文末“阅读原文”获取免费pdf
摘 要针对传统加工生产线中可视化系统数据与虚拟场景相结合问题,提出数字孪生可视化系统框架,通过生产线三维可视化场景搭建、机器人通信功能开发,营造虚拟空间中的沉浸式场景,实现物理实体与虚拟模型的虚实场景交互。基于Unity3D开发出生产线可视化系统,实现虚拟场景中的场景漫游、人机交互和数据可视化,通过实验验证,生产线可以达到虚实同步的要求,在运行过程中数据实时更新于开发的可视化界面上,实现可视化系统中数据与场景的结合。 关键词数字孪生;虚实交互;Unity3D;沉浸式场景 1引言
工业4.0的推进加速了智能制造技术的发展,智能制造充分融合了信息技术、自动化技术、人工智能等。而数字孪生[1]作为一种数字化、智能化技术,正在越来越多地应用于智能制造实际生产中。 目前众多学者在车间生产过程监控、机加工生产线三维可视化等方面已有许多研究。殷民艇等[2]设计了基于Unity3D的机床加工系统,完成系统的动画效果与UI交互控制,实现机床加工方式介绍以及交互式机床演示等功能;张南等[3]利用数字孪生技术对车间生产过程监控方法进行研究,实现车间生产作业过程的三维虚拟可视化及实时动态交互;张晓萍等[4]对灌装生产线监控硬件平台、控制系统和数据处理方法进行研究,实时处理多源异构数据,采用GE PAC可编程控制器和iFIX组态软件,开发了基于数字孪生的灌装生产线动态实时可视化监控系统;冯诚能等[5]采用数字孪生技术对数控机床运行监测系统进行了设计与开发,能以二维图表的形式监测机床的运行数据;吴琦等[6]提出一种数字孪生驱动的车间物流配送实时监控方法,对车间虚拟建模技术、车间物流实时状态信息处理等关键技术进行了研究。 上述研究对生产线多设备数据集成、生产过程信息可视化、机床运行监测等问题进行了分析与探索。在工业上对数字孪生应用的研究主要集中在车间的宏观调度层面,对生产过程的可视化、可视化系统中数据与三维模型的结合研究较少。基于上述问题,本文设计了一种基于数字孪生的加工生产线可视化系统,对三维虚拟生产线场景搭建、生产线多设备实时数据交互、实时数据显示等问题展开研究[7]。 2生产线数字孪生可视化系统框架设计
数字孪生本质上是一种双向的虚实映射,通过孪生数据对物理实体和虚拟模型实现双向驱动,建立通信系统,将实体生产线与虚拟生产线相连接,利用虚实交互技术,设计面向实际生产的数字孪生可视化系统,对工业制造与生产管控的信息智能化提供一定帮助。 本文以盘类零件加工生产线为对象,应用数字孪生技术设计了一条孪生线,此孪生线由仓储库、输送带、变位机和加工中心等单元组成,为使生产线结构紧凑,采取U字型生产线结构,中枢为机器人,能够完成零件的加工、装配、入库。在可视化系统中,实现生产线与数据的可视化、营造沉浸式场景时,需要保证模型的质量,为了提高可视化效果[8],在构建虚拟场景时需要从不同的角度出发,完成模型的优化、生产线的布局、场景的转换,最终搭建出趋近于真实渲染的可视化场景,进一步完成数据的可视化效果。本文提出的产品装配线数字孪生可视化系统框架由实体层、虚拟层、数据层、应用层四部分组成,如图1所示。 本文研究的可视化场景的优化设计着重于虚拟场景中模型高保真还原,虚拟场景中的模型由实体层构建而来,实体层是现实环境中的生产线,是数字孪生系统的搭建基础。虚拟层则是根据实体层中真实生产线设备的外形结构建模,为了使模型具有实体属性,原始模型构建完成后需要进行优化处理,包括模型的渲染、材质的处理等操作,使可视化场景更加真实美观[9]。数据层由实体层和虚拟层中设备产生的数据构成,是实体层与虚拟层之间虚实映射的桥梁。孪生数据在系统中采集与传输,处理好的数据被用来实时驱动虚拟场景,连接实体层与虚拟层,保证虚实场景能够同步运行。对于此加工生产线,结合可视化系统的实际用户需求,虚拟实体并不满足于在没有场景空间的单一模型中运行,所以在虚拟层中要相对于原始模型提高模型的优化程度并完成场景搭建,此外数据的显示也是直接提升用户体验的关键,通过多源异构数据处理,基于人机交互友好性设计界面,使用户所需数据实时清晰地显示于生产线运行界面中。 依据上述框架,本文在开发数字孪生可视化系统时,考虑到操作系统的兼容性,以Unity3D引擎作为主要工具,作为虚拟现实平台,它可应用于不同的操作系统且支持多平台,通过Unity生态系统大量的插件和丰富的资源搭建可视化场景[10],同时Unity3D的组件化设计可以根据用户需求增加新功能和模块。应用Visual Studio编写C#代码,将代码导入Unity3D平台上的Scripts包中,C#代码在平台中辅助界面设计、人机交互、数据显示等功能设计[11],使所开发的应用程序功能完善。利用预制件功能管理不同功能的代码脚本,将平台中的模型、场景及代码等单元集成于应用程序中,将开发的应用程序与实体设备连接,实时反映生产线的实际运行情况,使生产线动态可视化[12]。 3生产线三维虚拟场景搭建
生产线的三维模型是对实体属性的反映,其对可视化的效果有很大的影响,同时模型的质量也影响着数字孪生可视化系统与用户的交互性,根据对系统的整体设计规划,进行孪生体的构建[13]。孪生体构建流程如图2所示。 对于创建好的加工生产线模型,经过STEP格式转换,可导入3ds Max中进行模型优化处理,优化后的模型再经FBX格式转换,导入Unity3D中进行可视化场景搭建。在3ds Max中利用高质量的渲染引擎对模型进行优化处理,包括对模型进行材质和贴图处理,根据实体设备的材质属性对创建好的模型增添材质,增强模型的可视化效果,导入到3ds Max中的模型多边形数量庞大,应有效降低模型多边形数量,因此对网格模型进行简化操作,轻量化处理后的模型仍可以满足实时交互、实时更新的要求,模型能够快速显示且运行更加流畅。 创建好的模型只是单一的生产线模型,不具有空间属性,需为模型添加空间场景。其目的是加强生产线运行过程的真实性,使模型不仅能在数据的驱动下运行,还能在趋近于真实的沉浸式场景中符合现实规律运行。模型对比如图3所示。 使用UG NX模拟生产线运行过程时模型的数据透明化程度较低,对上述模型优化处理操作后将模型导入Unity3D中,通过对比发现,在Unity3D中搭建好场景后的虚拟空间更加真实,在场景中可以对交互功能进行研究与设计。 Unity3D可以使模型和数据可视化,提供沉浸式的用户体验和实时的监控分析。通过这种整合,能够在数字环境中进行真实的生产线场景可视化。单一模型不利于构建可视化系统,所以在Unity3D中需要进行场景搭建,通过格式转换将模型导入搭建的场景中,展现真实的生产线设备运行状态。在Unity3D中搭建的空间虚拟场景不具有实体层的属性,为了提升场景的真实感和视觉效果,以营造沉浸式场景,在车间中根据场景布置、调整光源,以区域光源搭配点光源照亮场景,确保光源大小与实际灯具相符,增加光照的均匀性。通过Unity3D中的Lighting组件选择baked模式进行灯光烘焙,调整光源的强度和颜色,确保与车间环境相符,以便用户可以清楚地看到生产线细节和运行过程。根据设备的实际布局和要求,在Unity3D场景中摆放和组织模型,尽可能做到实体层的高保真还原,营造沉浸式场景,使用Unity3D的场景视图和层次视图来管理场景的结构,灯光烘焙效果如图4所示。通过搭建虚拟场景为后续设计交互元素,如按钮、漫游、实时数据可视化等做准备。 4机器人数据可视化
孪生数据是数字孪生系统中关键的一环,是虚拟模型和物理实体虚实交互的基础。本文基于U字型加工生产线结构,选取ABB IRB120型号机器人,其敏捷、紧凑、轻量的特点适配于本文生产线。以机器人为例,分散的数据不能让用户直观了解生产线的同步运行信息,通过数据处理实现数据可视化,使所需孪生数据在可视化场景中可以实时更新。 机器人数据包括静态数据与动态数据,机器人型号、尺寸等属于静态数据,机器人6个轴的角度、速度、加速度、机器人末端位置等属于动态数据,ABB机器人数据如表1所示。 表1ABB机器人数据
实体机器人与Unity的通信技术路线如图5所示,采用Robot Web Services协议,基于Web服务架构,和ABB机器人之间的消息由XML和JSON组成,具有较好的跨平台性和通用性,ABB机器人与PC端之间的通信通过工业以太网接口完成。在Unity中编写C#代码,设置布尔类型的静态变量,用于控制机器人的远程通信配置、连接状态管理等功能。创建float类型数组和string类型数组,用于存储机器人关节角度信息、笛卡尔坐标信息和用来表示机器人姿态的四元数,其初始值为0。查询实体机器人IP地址用于XML格式的通信,检测到与ABB机器人连接后,启用两个后台线程分别读取ABB机器人的XML和JSON数据。它利用多线程机制,确保在主线程运行时异步获取和处理机器人的实时数据,同时通过状态机管理程序的不同操作状态,将采集到的数据传输到创建的变量中用来实时更新[14 - 15],Unity3D中的Update组件通过帧更新的方法实现实时变换。 以NX中机器人数据的显示为例,其数据显示于冗长的表格中,不利于用户及时查询所需数据,大量不常用数据的堆叠使用户的体验感降低,数据显示的效果也亟待提高,在Unity3D中可以根据用户需求,提取用户所需要的较常用关键数据,使精简数据集中显示于界面上,相比于传统建模软件,可视化效果有很大的提升,用户也可以在设备运行过程中及时了解生产线状态信息。在ABB机器人示教器中,有两种机器人数据的显示界面,分别显示6个轴的旋转角度、坐标中的位置及用于表示三维空间中旋转的四元数,如图6所示。 这些数据是用户了解机器人运行状态的关键数据,为实现设备运行过程动态展示数据的可视化场景,根据需求进行数据显示界面设计。数据框要求简洁明了,所需数据清楚地显示于表格中;数据框要调整为半透明状态,使可视化场景有更好的观感。应用Unity中的UGUI组件,将上述采集到的机器人数据以Text形式对应显示于所设计的界面中,使数据在可视化场景中实时更新,设计前后的数据对比如图7所示。 5可视化系统开发与验证
综上所述,可视化系统的开发步骤:(1)模型构建,在不同的软件中进行装配线模型的创建、优化,确保所有设备和组件的准确性;(2)可视化场景搭建,将模型导入Unity3D,设置场景布局、灯光烘焙,确保视觉效果符合需求;(3)孪生数据处理,通过编写C#代码,将实时数据传输到Unity3D中;(4)UI界面设计,使用Unity3D中UI组件设计界面、控制面板等,显示实时数据和状态;(5)人机交互功能,设计并实现交互功能,点击查看详细数据、场景漫游、虚拟仿真等;(6)数据可视化,集成图表和实时数据展示工具,结合设备运行过程动态展示生产线信息。 为了实现可视化系统中各设备信息的映射,需要使实体生产线与虚拟场景进行数据交互,产品装配线通过以太网、工业交换机、远程I/O模块的方式与实体机器人、旋转供料、立体仓库、加工中心等工位的设备进行连接,形成系统的通信网络,再通过采集、处理和传输,将实体设备中的数据映射到Unity3D可视化场景中,驱动虚拟实体运行,实现虚实交互。根据上述对ABB机器人的数据处理过程,以Unity3D 2020.3.48为平台验证系统的虚实同步,实体机器人与虚拟机器人的位姿对比如图8所示。 通过图8可以看出,虚拟机器人与实体机器人所处位置几乎相同,手动操作示教器时,虚拟机器人可以同步实体机器人实时运行,对比表2的虚实交互数据发现,虚体与实体之间还存在着微小差距,试验结果表明本文所设计系统基本可以达到虚实同步的要求。 表2虚实交互数据验证
进行UI设计时应先对功能需求进行分析。进入监控系统需要在登录界面输入用户名及密码,从而使监控系统更加规范化并保护系统内数据,借助Unity中的UI组件设计界面,如图9所示。UI中的Button组件是实现交互的关键,在对其配置前需进行逻辑分析,为方便管理,使用C#配置UI管理脚本程序,将创建好的功能节点写入程序并上传至Unity3D,通过Button组件中的On click()选项挂载各功能节点实现界面及场景的跳转。 场景漫游功能基于C#脚本实现,在沉浸式场景中,通过鼠标和键盘操作可以让用户查看监控系统中的不同区域和设备。通过漫游,用户可以像在现场一样巡视各个角落,检查设备的运行状态和环境条件。通过设备认知功能,使用者可以了解每个工位上设备的参数,从而更加熟悉生产线,如图10所示。通过对机器人与Unity3D的通信开发,可在Unity中对机器人及生产线其他设备的运动进行控制,实现运动仿真功能。 客户端获取到生产线运行多源异构数据后,在Unity3D引擎中对实时数据进行可视化场景界面开发,实现模型的实时驱动需要用到Update方法,此方法会被引擎定时调用,以更新模型状态。根据客户端接收到的实时数据,在Update方法中动态更新模型,根据机器人速度、加速度、力矩,加工中心及生产线其他信息的参数,对实时数据显示界面进行设计,通过C#脚本控制各参数数据实时更新,即实现数据的交互,使虚拟环境中的模型真实反映实体生产线的运行状态。设计状态显示面板如图11所示,输入IP地址与实体设备进行连接,实现虚实同步运行,生产线中的重要数据实时显示于界面上,有利于使用者了解设备的运行状态。 6结论
对基于数字孪生的加工生产线可视化场景设计进行了研究,提出了数字孪生可视化系统框架。构建生产线的三维模型,通过3ds Max完成模型的材质、贴图、轻量化处理并对模型进行优化;在Unity3D中导入模型进行可视化场景搭建和优化设计,开发ABB机器人通信功能,实现数据的采集、处理与传输。经实验验证,虚实场景交互可以满足虚实同步的要求,对UI及交互功能进行设计,将可视化系统与三维模型结合,实现场景漫游、实时数据可视化等功能,使数据显示更加友好,结合设备运行过程动态展示生产线信息,提高管理效率。 1.Grieves W M. Product lifecycle management: The new paradigm for enterprises[J]. International Journal of Product Development, 2005, 2(1/2): 71 - 84.
2.殷民艇, 董磊, 张星, 等. 基于Unity3D的机床加工系统设计与实现[J]. 制造技术与机床, 2022(5): 164 - 168.
3.张南, 张顺, 刘利勋, 等. 基于数字孪生的车间生产过程监控方法[J]. 组合机床与自动化加工技术, 2022(7): 156 - 159.
4.张晓萍, 窦金生, 宋天麟, 等. 基于数字孪生的生产线监控系统研究[J]. 包装与食品机械, 2022, 40(4): 73 - 78.
5.冯诚能, 李亮, 陈妮, 等. 基于数字孪生的数控机床运行监测系统设计与开发[J]. 工具技术, 2024, 58(2): 105 - 109.
6.吴琦, 张胜文, 国明义, 等. 数字孪生驱动的车间物流可视化监控方法[J]. 机床与液压, 2023, 51(22): 120 - 126, 131.
7.周成, 孙恺庭, 李江, 等. 基于数字孪生的车间三维可视化监控系统[J]. 计算机集成制造系统, 2022, 28(3): 758 - 768.
8.徐健, 赵一剑, 刘高峰, 等. 基于数字孪生的工业机器人建模及监测方法[J]. 西安工程大学学报, 2024, 38(2): 124 - 133.
9.王进峰, 问丛川, 花广如, 等. 基于Unity3D的数控机床数字孪生系统设计与实现[J]. 中国工程机械学报, 2023, 21(5): 443 - 448.
10.蔡兴旺, 裴耀强, 杨继华, 等. 煤矿掘进机系统数字孪生技术研究[J]. 系统仿真学报, 2024, 36(10): 2455 - 2468.
11.杜莹莹, 罗映, 彭义兵, 等. 基于数字孪生的工业机器人三维可视化监控[J]. 计算机集成制造系统, 2023, 29(6): 2130 - 2138.
12.王义军, 陈旭, 张志斌, 等. 基于数字孪生的桥式起重机智能健康管理系统设计[J]. 机械设计, 2024, 41(S2): 61 - 65.
13.蒋宝山, 盛步云, 秦超朋, 等. 某机加工生产线3D虚拟监控系统设计与研发[J]. 现代制造工程, 2023(6): 101 - 106, 131.
14.黄涵钰, 毛柯夫, 苑明海, 等. 数据驱动的生产线数字孪生系统构建与应用[J]. 制造技术与机床, 2024(2): 67 - 74.
15.郑苏芮, 杨德生, 张昕, 等. 数字孪生驱动的堆垛机模型可视化设计与实现[J]. 现代制造工程, 2024(7): 109 - 116.
Design and Implementation of Visualization System for Production Line Based on Digital Twin
Zou MingzheLi HuanfengSha JieNiu YongboSun Weilong
Abstract: The objective of this study is to address the challenge of integrating the data from a visualisation system and a virtual scene within the conventional processing production line. To this end, a digital twin visualisation system framework has been proposed, which aims to create an immersive scene in a virtual space. This is to be achieved by constructing a three-dimensional visualisation of the production line and developing a robot communication function. The ultimate goal is to facilitate interaction between physical entities and virtual models within the virtual scene. A production line visualization system has been developed based on Unity3D. This system enables scene roaming, human-computer interaction and data visualization in the virtual scene. Experimental verification demonstrates that the production line is capable of meeting the requirements of virtual-real synchronization. Furthermore, the data is updated in real time on the developed visualization interface during the operation of the production line. This allows for the combination of the data and the scene in the visualization system. Keywords: digital twin;virtual real interaction;Unity3D;immersive scene 引用本文:邹明哲,李焕锋,沙杰等.基于数字孪生的生产线可视化系统设计与实现[J].工具技术,2025,59(12):109-114.(Zou Mingzhe,Li Huanfeng,Sha Jie,et al.Design and Implementation of Visualization System for Production Line Based on Digital Twin[J].Tool Engineeing,2025,59(12):109-114.)
第一作者:邹明哲,硕士研究生,河南工业大学机电工程学院,450001 郑州市
通讯作者:李焕锋,教授,河南工业大学机电工程学院,450001 郑州市
中图分类号:TG702; TH18
文献标志码:A
邹明哲李焕锋沙杰牛泳博孙玮隆
(河南工业大学机电工程学院)
DOI:10.3969/j.issn.1000-7008.2025.12.014
点击文末“阅读原文”获取免费pdf
1引言
2生产线数字孪生可视化系统框架设计
3生产线三维虚拟场景搭建
4机器人数据可视化
表1ABB机器人数据
5可视化系统开发与验证
表2虚实交互数据验证
6结论
1.Grieves W M. Product lifecycle management: The new paradigm for enterprises[J]. International Journal of Product Development, 2005, 2(1/2): 71 - 84.
2.殷民艇, 董磊, 张星, 等. 基于Unity3D的机床加工系统设计与实现[J]. 制造技术与机床, 2022(5): 164 - 168.
3.张南, 张顺, 刘利勋, 等. 基于数字孪生的车间生产过程监控方法[J]. 组合机床与自动化加工技术, 2022(7): 156 - 159.
4.张晓萍, 窦金生, 宋天麟, 等. 基于数字孪生的生产线监控系统研究[J]. 包装与食品机械, 2022, 40(4): 73 - 78.
5.冯诚能, 李亮, 陈妮, 等. 基于数字孪生的数控机床运行监测系统设计与开发[J]. 工具技术, 2024, 58(2): 105 - 109.
6.吴琦, 张胜文, 国明义, 等. 数字孪生驱动的车间物流可视化监控方法[J]. 机床与液压, 2023, 51(22): 120 - 126, 131.
7.周成, 孙恺庭, 李江, 等. 基于数字孪生的车间三维可视化监控系统[J]. 计算机集成制造系统, 2022, 28(3): 758 - 768.
8.徐健, 赵一剑, 刘高峰, 等. 基于数字孪生的工业机器人建模及监测方法[J]. 西安工程大学学报, 2024, 38(2): 124 - 133.
9.王进峰, 问丛川, 花广如, 等. 基于Unity3D的数控机床数字孪生系统设计与实现[J]. 中国工程机械学报, 2023, 21(5): 443 - 448.
10.蔡兴旺, 裴耀强, 杨继华, 等. 煤矿掘进机系统数字孪生技术研究[J]. 系统仿真学报, 2024, 36(10): 2455 - 2468.
11.杜莹莹, 罗映, 彭义兵, 等. 基于数字孪生的工业机器人三维可视化监控[J]. 计算机集成制造系统, 2023, 29(6): 2130 - 2138.
12.王义军, 陈旭, 张志斌, 等. 基于数字孪生的桥式起重机智能健康管理系统设计[J]. 机械设计, 2024, 41(S2): 61 - 65.
13.蒋宝山, 盛步云, 秦超朋, 等. 某机加工生产线3D虚拟监控系统设计与研发[J]. 现代制造工程, 2023(6): 101 - 106, 131.
14.黄涵钰, 毛柯夫, 苑明海, 等. 数据驱动的生产线数字孪生系统构建与应用[J]. 制造技术与机床, 2024(2): 67 - 74.
15.郑苏芮, 杨德生, 张昕, 等. 数字孪生驱动的堆垛机模型可视化设计与实现[J]. 现代制造工程, 2024(7): 109 - 116.
Design and Implementation of Visualization System for Production Line Based on Digital Twin
Zou MingzheLi HuanfengSha JieNiu YongboSun Weilong
引用本文:邹明哲,李焕锋,沙杰等.基于数字孪生的生产线可视化系统设计与实现[J].工具技术,2025,59(12):109-114.(Zou Mingzhe,Li Huanfeng,Sha Jie,et al.Design and Implementation of Visualization System for Production Line Based on Digital Twin[J].Tool Engineeing,2025,59(12):109-114.)
第一作者:邹明哲,硕士研究生,河南工业大学机电工程学院,450001 郑州市
通讯作者:李焕锋,教授,河南工业大学机电工程学院,450001 郑州市
中图分类号:TG702; TH18
文献标志码:A

工具所官方微信

工具技术官方微信

