
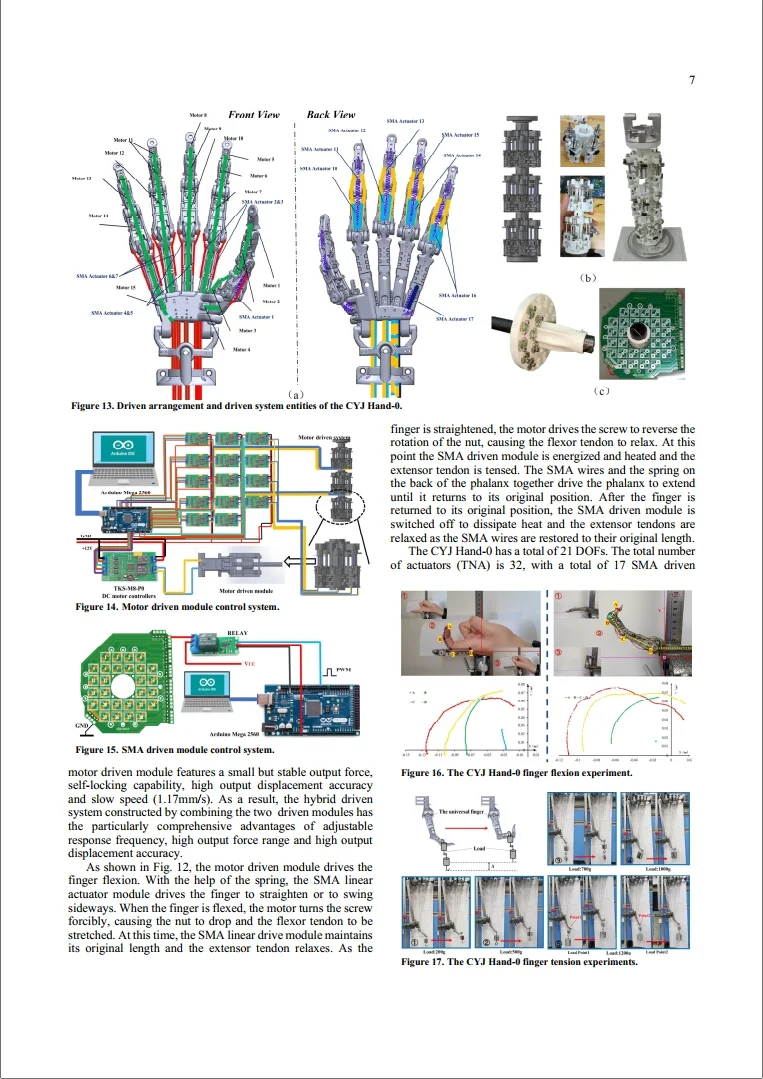
CYJ Hand-0 总共有 21 个自由度 (DOF)。执行器总数 (TNA) 为 32 个,其中 SMA 驱动模块共 17 个,电机驱动模块共 15 个。
大量的外部SMA驱动模块和电机驱动模块必须集成到连接在仿生灵巧手腕部的机械臂上,以方便通过肌腱传递力和位移。机械臂的构造方式为:将15个电机驱动模块排列成五层圆形结构,并堆叠三层。该机械臂采用白色树脂3D打印,总重量为780克。其上部与仿生灵巧手腕部相连,下部与UR10末端相匹配。其空心结构用于传递肌腱。每两个电机驱动模块之间留有间隙,以布置SMA驱动模块。如图所示,集成了12个SMA驱动模块。
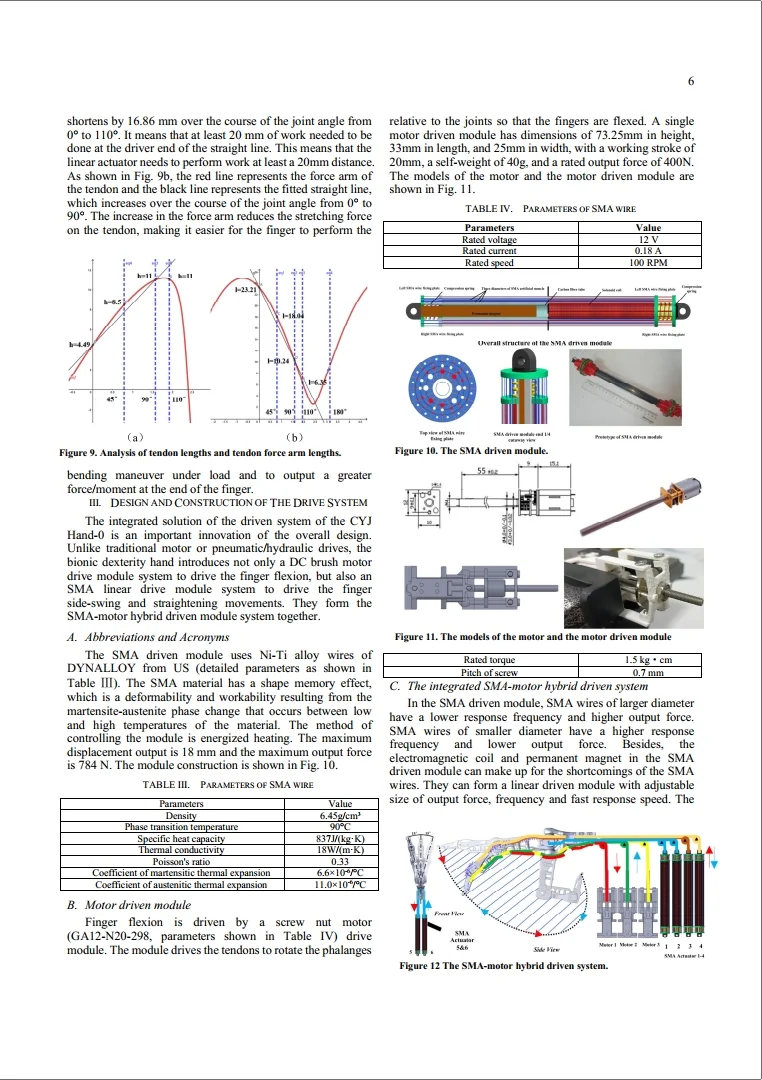
SMA驱动模块使用美国DYNALLOY公司的Ni-Ti合金丝(详细参数如表Ⅲ所示)。SMA材料具有形状记忆效应,这是一种由马氏体-奥氏体相变产生的可变形性和可加工性,该相变发生在材料的低温和高温之间。控制模块的方法是通电加热。最大位移输出为18毫米,最大输出力为784牛顿。
在SMA驱动模块中,较大直径的SMA线具有较低的响应频率和较高的输出力。较小直径的SMA线具有较高的响应频率和较低的输出力。此外,SMA驱动模块中的电磁线圈和永磁体可以弥补SMA线的不足。它们可以形成线性驱动模块,其输出力、频率和快速响应速度可调。电机驱动模块的特点是输出力小而稳定、具有自锁能力、输出位移精度高且速度慢(1.17mm/s)。因此,通过结合两个驱动模块构建的混合驱动系统具有特别全面的优势,即响应频率可调、输出力范围大和输出位移精度高。
#灵巧手 #人形机器人 #具身智能
大量的外部SMA驱动模块和电机驱动模块必须集成到连接在仿生灵巧手腕部的机械臂上,以方便通过肌腱传递力和位移。机械臂的构造方式为:将15个电机驱动模块排列成五层圆形结构,并堆叠三层。该机械臂采用白色树脂3D打印,总重量为780克。其上部与仿生灵巧手腕部相连,下部与UR10末端相匹配。其空心结构用于传递肌腱。每两个电机驱动模块之间留有间隙,以布置SMA驱动模块。如图所示,集成了12个SMA驱动模块。
SMA驱动模块使用美国DYNALLOY公司的Ni-Ti合金丝(详细参数如表Ⅲ所示)。SMA材料具有形状记忆效应,这是一种由马氏体-奥氏体相变产生的可变形性和可加工性,该相变发生在材料的低温和高温之间。控制模块的方法是通电加热。最大位移输出为18毫米,最大输出力为784牛顿。
在SMA驱动模块中,较大直径的SMA线具有较低的响应频率和较高的输出力。较小直径的SMA线具有较高的响应频率和较低的输出力。此外,SMA驱动模块中的电磁线圈和永磁体可以弥补SMA线的不足。它们可以形成线性驱动模块,其输出力、频率和快速响应速度可调。电机驱动模块的特点是输出力小而稳定、具有自锁能力、输出位移精度高且速度慢(1.17mm/s)。因此,通过结合两个驱动模块构建的混合驱动系统具有特别全面的优势,即响应频率可调、输出力范围大和输出位移精度高。
#灵巧手 #人形机器人 #具身智能
