

近日,一支科研团队研发出一款针对木瓜温室的自主农药喷洒机器人,其核心创新在于采用超宽带(UWB)与IMU(惯性测量单元)融合的导航系统,更好地解决了传统喷洒方式的诸多问题。
传统温室喷洒依赖人工或GPS导航,人工意味着人员易接触农药,GPS则因温室的封闭环境,信号弱,难以可靠应用。
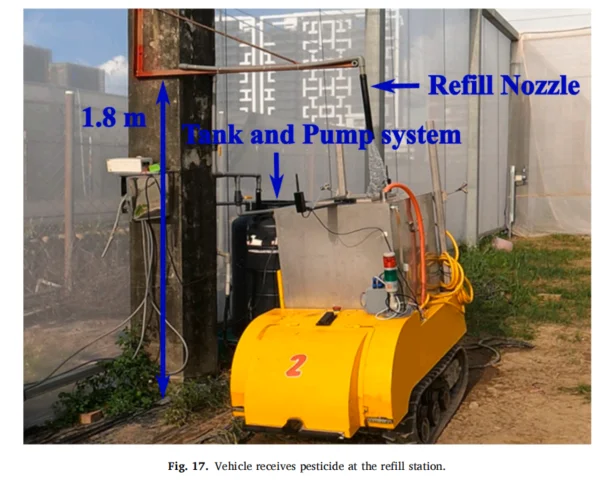
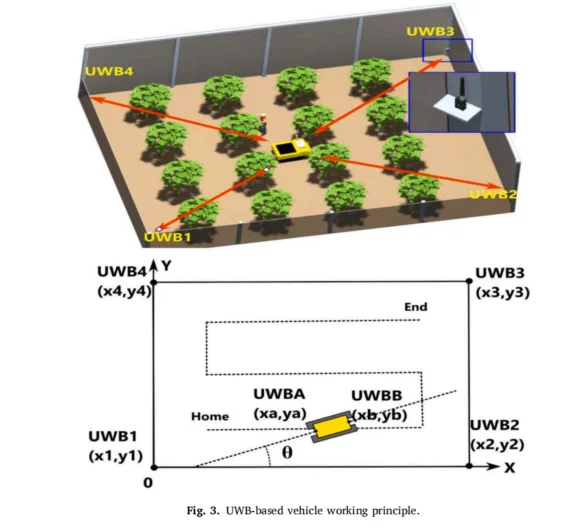
在该机器人的导航系统中,温室角落设置固定UWB基站,机器人前后安装UWB标签,结合IMU提供的姿态和加速度数据,通过卡尔曼滤波算法融合信息,实现精准定位与定向。机器人可沿预设路径自动喷洒,当农药箱余量不足时,能自主导航至补给站补充农药,随后返回中断点继续作业,全程无需人工干预。
图一、图三为木瓜温室棚测试照片
图二为实现原理
实验结果表明,机器人在0.4m/s的运行速度下,横向偏差控制在合理范围,可安全通过1.1米宽的温室通道,避免损伤作物。其自动补给功能稳定,喷洒覆盖效果良好。该系统不仅减少了人工接触农药的情况,还提升了喷洒效率,为温室农业自动化提供了可行方案,有望推动相关技术向更智能方向发展。
参考资料:
Kohei Nishizawa, Takeo Nagura, Naomichi Ogihara. Assessment of knee joint motion during gait using IMU-based helical axis analysis for early detection of knee osteoarthritis [J]. Biomedical Signal Processing and Control, 2026, 112:108643.
本文仅摘录核心观点用于科普分享,完整研究可通过 DOI:10.1016/j.bspc.2025.108643 检索查阅。
#科技农业创新农业 #智慧农业技术 #自动灌溉系统 #IMU
惯师自研,高稳定、高性价比动捕遥操设备,可上官网查看!ImuMaster
传统温室喷洒依赖人工或GPS导航,人工意味着人员易接触农药,GPS则因温室的封闭环境,信号弱,难以可靠应用。
在该机器人的导航系统中,温室角落设置固定UWB基站,机器人前后安装UWB标签,结合IMU提供的姿态和加速度数据,通过卡尔曼滤波算法融合信息,实现精准定位与定向。机器人可沿预设路径自动喷洒,当农药箱余量不足时,能自主导航至补给站补充农药,随后返回中断点继续作业,全程无需人工干预。
图一、图三为木瓜温室棚测试照片
图二为实现原理
实验结果表明,机器人在0.4m/s的运行速度下,横向偏差控制在合理范围,可安全通过1.1米宽的温室通道,避免损伤作物。其自动补给功能稳定,喷洒覆盖效果良好。该系统不仅减少了人工接触农药的情况,还提升了喷洒效率,为温室农业自动化提供了可行方案,有望推动相关技术向更智能方向发展。
参考资料:
Kohei Nishizawa, Takeo Nagura, Naomichi Ogihara. Assessment of knee joint motion during gait using IMU-based helical axis analysis for early detection of knee osteoarthritis [J]. Biomedical Signal Processing and Control, 2026, 112:108643.
本文仅摘录核心观点用于科普分享,完整研究可通过 DOI:10.1016/j.bspc.2025.108643 检索查阅。
#科技农业创新农业 #智慧农业技术 #自动灌溉系统 #IMU
惯师自研,高稳定、高性价比动捕遥操设备,可上官网查看!ImuMaster
