
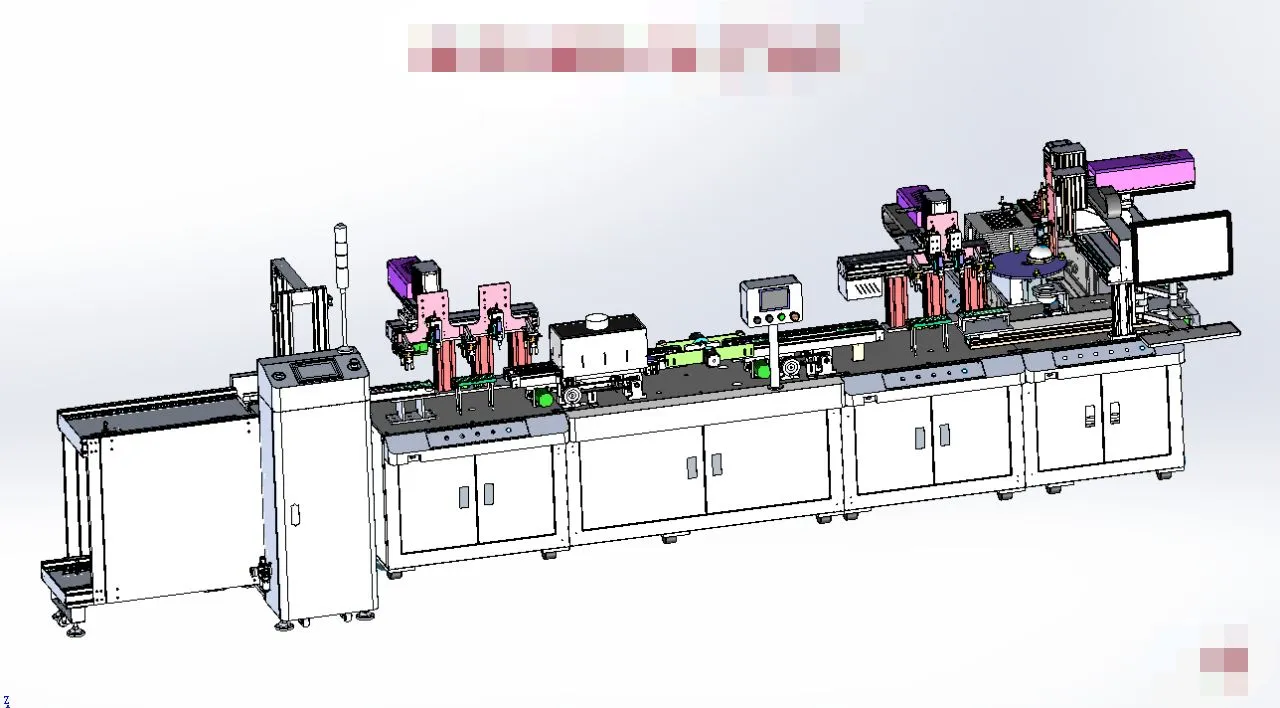
这是前段时间做的一台联机设备(多台设备连接完成一整套的工艺流程),设备是给一个指纹识别的东西点胶,然后UV固化,再反面点胶,然后组装,最后把成品取出来放到指定位置。过程很简单:
上料机把板子(一个板上面有几十个指纹识别的产品粘在一起)推过来,1号工站的设备抓取,然后点胶,运动模组是悬臂式的三轴,Z轴抓取跟点胶是一起的,这是跟经典的一出二模式结构。
点胶完成后流进线体进行固化,这是2号机,固化完后进入翻转机构,板子翻转到另外一面,再流入另外一段线体的末端,,3号机的悬臂模组过来抓取,放到指定位置点胶,这次点胶是两种胶水,就是两种点胶阀,上下切换点胶,完了后被抓取进入组装工位,组装一个盖子,盖子怎么来的呢?
在5号工站有tray盘,这个tray盘是人工放在一摞顶升机构上上的,5号工站的模组把tray盘中的盖子一个一个抓取过来放在4号工位的四工位凸轮分割器上,用然后4号工位的模组把盖子吸取出来,上下两个相机对位拍,定位好了位置就把盖子放在点胶好的板子上,一个指纹识别的对应一个盖子,最后成品就是一个下料机械手(无杆气缸+一个导杆气缸)把成品放到客户对应的线体上。
啰嗦一下,这个一层的tray盘上的盖子被取完了后,空tray盘也是被5号工站的模组给卸料到一个斜槽位的,然后下面的tray盘被顶升一格,整个顶升的机构我选用的电缸。
还有,在没有视觉的地方,抓取点胶或者组装时我都做了二次定位,因为担心抓取后位置会偏移。
以上就是这台设备的一个基本情况。#非标自动化 #设备 #自动生产线
上料机把板子(一个板上面有几十个指纹识别的产品粘在一起)推过来,1号工站的设备抓取,然后点胶,运动模组是悬臂式的三轴,Z轴抓取跟点胶是一起的,这是跟经典的一出二模式结构。
点胶完成后流进线体进行固化,这是2号机,固化完后进入翻转机构,板子翻转到另外一面,再流入另外一段线体的末端,,3号机的悬臂模组过来抓取,放到指定位置点胶,这次点胶是两种胶水,就是两种点胶阀,上下切换点胶,完了后被抓取进入组装工位,组装一个盖子,盖子怎么来的呢?
在5号工站有tray盘,这个tray盘是人工放在一摞顶升机构上上的,5号工站的模组把tray盘中的盖子一个一个抓取过来放在4号工位的四工位凸轮分割器上,用然后4号工位的模组把盖子吸取出来,上下两个相机对位拍,定位好了位置就把盖子放在点胶好的板子上,一个指纹识别的对应一个盖子,最后成品就是一个下料机械手(无杆气缸+一个导杆气缸)把成品放到客户对应的线体上。
啰嗦一下,这个一层的tray盘上的盖子被取完了后,空tray盘也是被5号工站的模组给卸料到一个斜槽位的,然后下面的tray盘被顶升一格,整个顶升的机构我选用的电缸。
还有,在没有视觉的地方,抓取点胶或者组装时我都做了二次定位,因为担心抓取后位置会偏移。
以上就是这台设备的一个基本情况。#非标自动化 #设备 #自动生产线
