
01
展会信息
展会时间
2023年8月16-21日
展会地点
北人亦创国际会展中心
展位号
序厅-X024
02
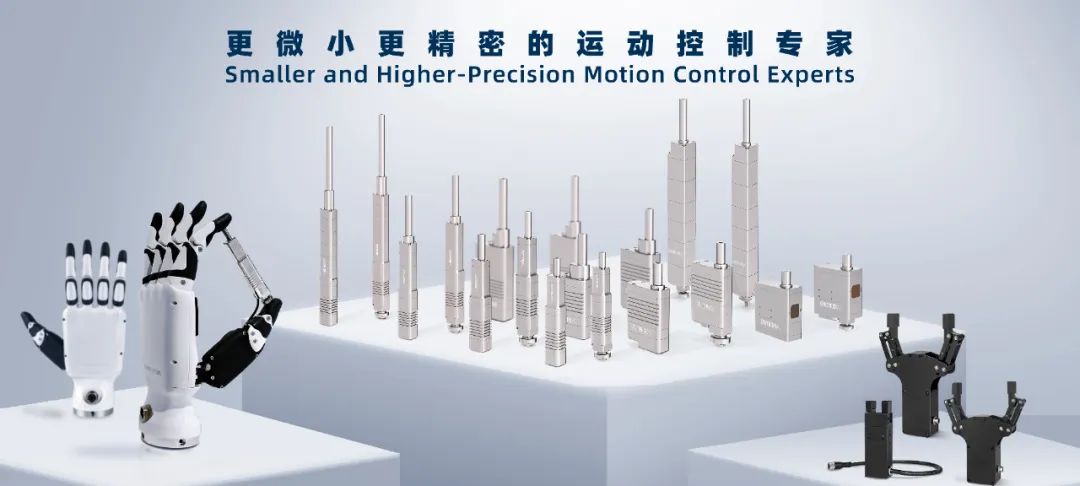
特色展品
微型伺服电缸

微型伺服电缸是一种小型一体化直线伺服系统,是机器人、医疗器械、工业设备等精密机电设备的核心运动部件。其内部集成了空心杯电机、精密行星减速器、传感器、精密螺杆机构及闭环控制系统,具有体积小、精度高、负载大等技术特点,可以实现行程范围内任意位置精确伺服控制。内置绝对位置传感器,断电后不会丢失位置信息,无需找零位。
仿人五指灵巧手

因时机器人的仿人五指灵巧手采用创新型直线驱动设计,内部集成了6个微型伺服电缸。单手具有6个自由度和12个运动关节,外形美观且高度仿真,结合力位混合控制算法,具有亚毫米级定位精度和数千克的负载能力,可以模拟人手实现精准的抓取操作。应用于服务机器人末端执行器、假肢、教育科研装备和特种工业应用等。
外骨骼

外骨骼机械手是一款穿戴式机械手产品,集成微型伺服电缸、角度传感器和力传感器,可以实时采集和控制每一个手指的抓握力。具有仿生设计、力感知、力控制和快速响应等特点。
Stewart平台

6自由度Stewart平台是一个并联机器人,由6个独立微型伺服电缸支撑的表面组成。该平台可在三维空间内任意调整位置和朝向。应用领域包括飞行器仿真、精密光学实验和机床工具等。
往期推荐

点击阅读原文,获取产品资料!
