
01资料概览
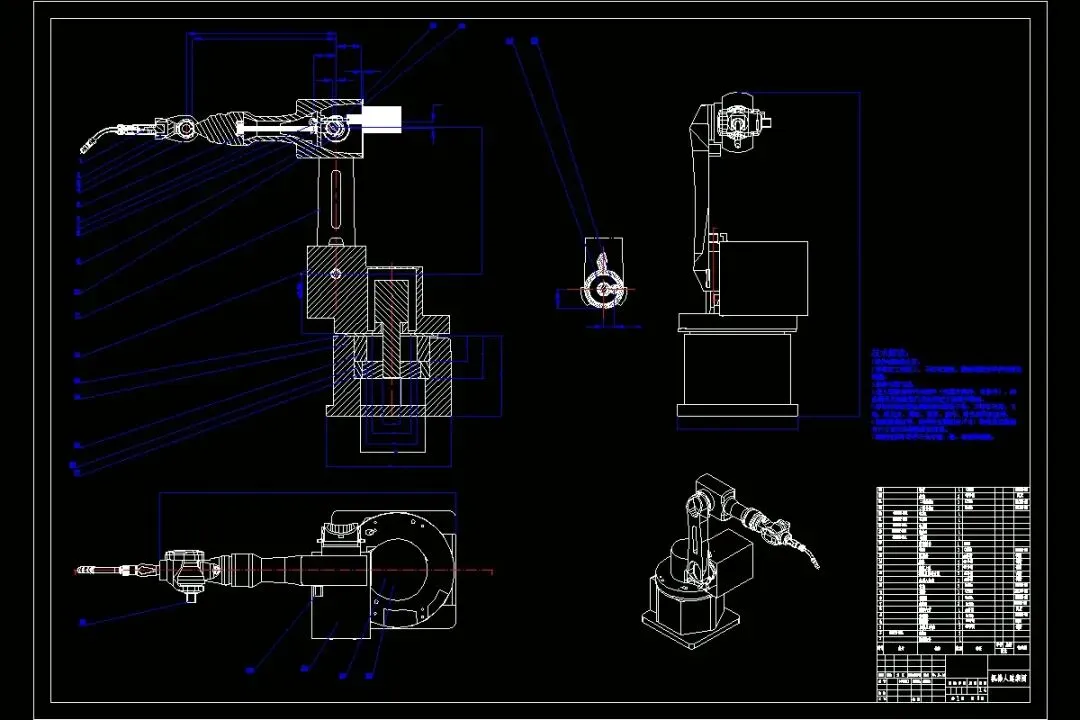
本套资料围绕"汽车生产线焊接机器人结构设计[含Catia三维图]"展开,据不完全统计,全世界在役的工业机器人中大约有将近一半的工业机器人用于各种形式的焊接加工领域,焊接机器人应用中最普遍的主要有两种方式,即点焊和电弧焊。我们所说的焊接机器人其实就是在焊接生产领域代替焊工从事焊接任务的工业机器人。这些焊接机器人中有的是为某种焊接方式专门设计的,而大多数的焊接机器人其实就是通用的工业机器人装上某种焊接工具而构成的。在多任务环境中,一台机器人甚至可以完成包括焊接在内的抓物、搬运、安装、焊接、卸料等多种任务,因此,从某种意义上来说,工业机器人的发展历史就是焊接机器人的发展历史。 众所周知,焊接加工一方面要求焊工要有熟练的操作技能、丰富的实践经验、稳定的焊接水平;另一方面,焊接又是一种劳动条件差、烟尘多、热辐射大、危险性高的工作。工业机器人的出现使人们自然而然首先想到用它…通过系统化的方案设计和参数计算,完整呈现了从需求分析到详细设计的全流程技术方案,适合机械、电气及自动化类专业学生作为毕业设计和课程设计参考。
02作品包含
Word版说明书1份,共57页,约20000字 任务书一份 开题报告一份 外文翻译一份 CAD版本图纸,共6张 Catia三维图一套
本文源文件领取方法,关注本公众号,回复 「000」 获取资料。
03核心结构拆解
汽车生产线焊接机器人结构设计[含Catia三维图]的设计采用PLC作为核心控制器。方案分三大部分:第一部分为控制系统总体设计——根据工艺要求确定I/O点数、选择PLC型号(如S7-200/S7-1200/三菱FX系列)并规划系统网络架构;第二部分为电气系统设计——绘制主电路图和控制电路图,完成电气元件选型(断路器、接触器、继电器、变频器等);第三部分为软件设计——编写梯形图/LAD程序或SCL程序,设计触摸屏/HMI画面(MCGS/威纶通/西门子),实现自动/手动/报警等功能切换。


04工作原理
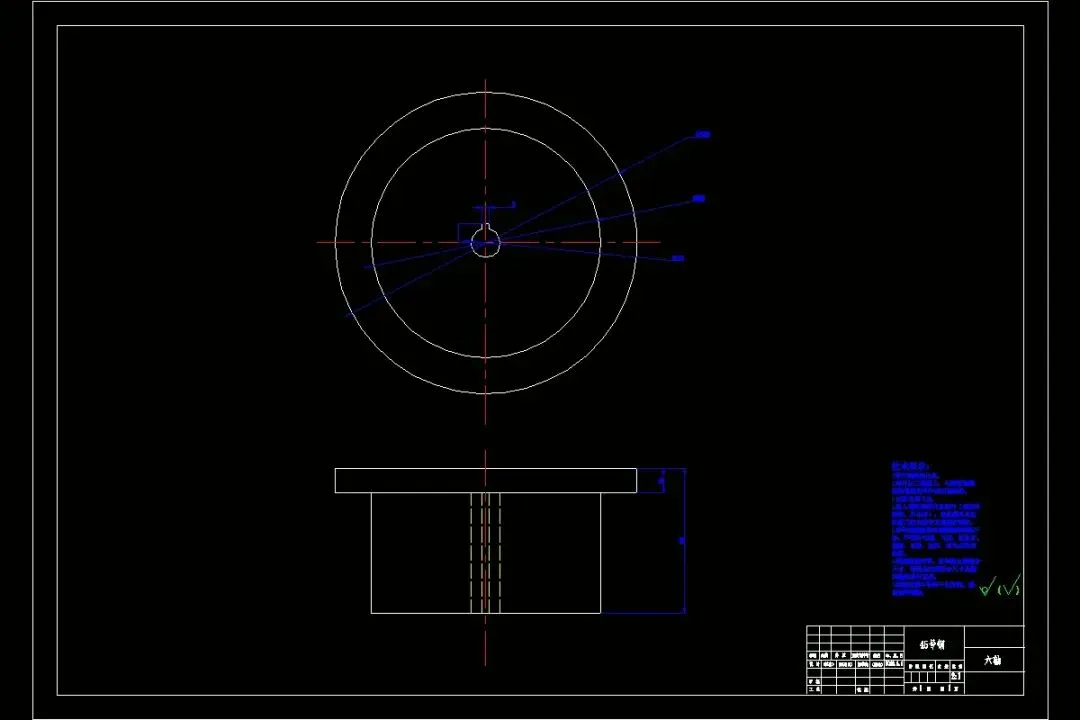
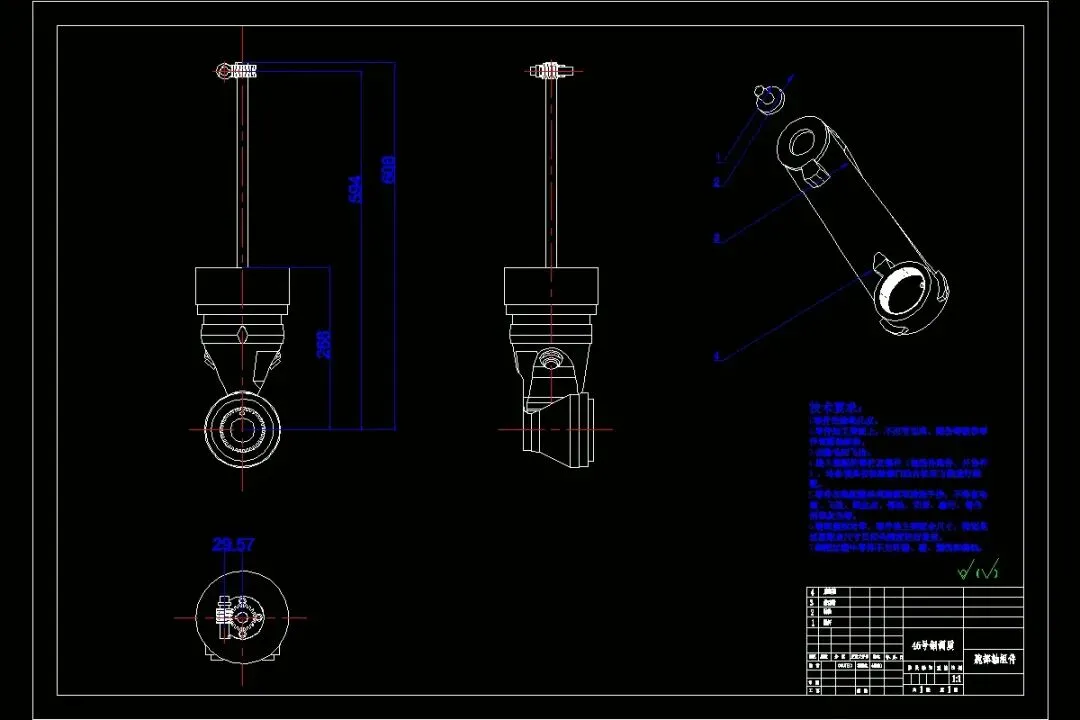
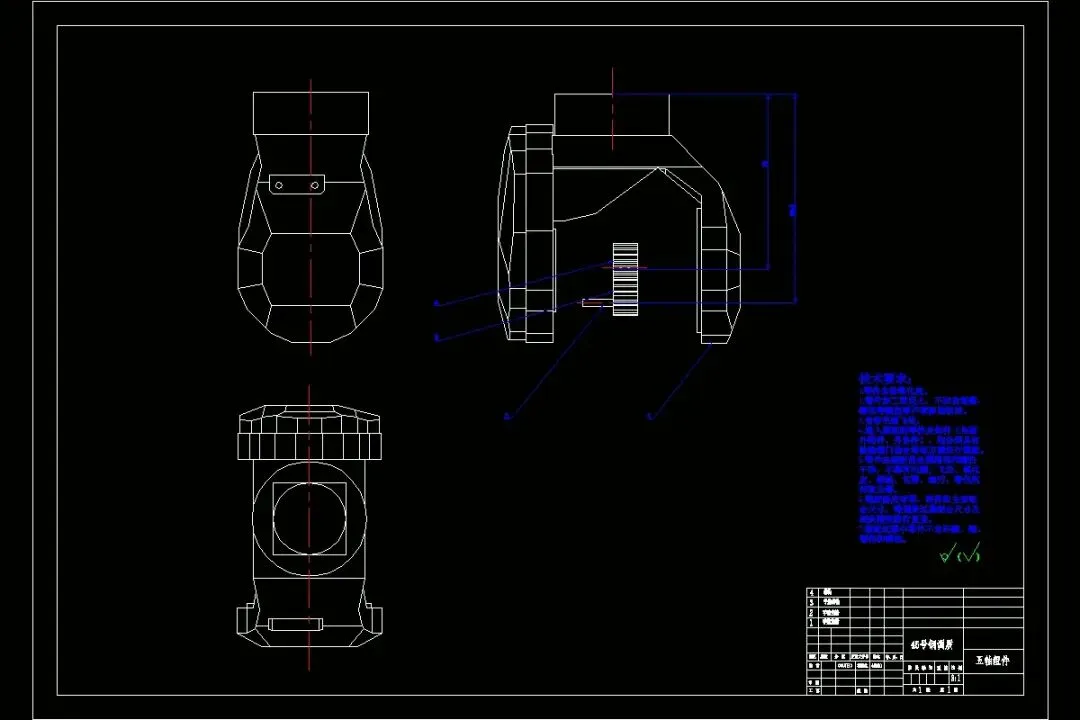
汽车生产线焊接机器人结构设计[含Catia三维图]工作时,动力从输入轴传入,经第一级齿轮副完成第一次减速增扭。随后动力传递到中间轴,经过第二级齿轮副再次减速增扭后从输出轴传出。各级齿轮通过花键或平键与轴连接传递扭矩,轴承支撑轴的旋转并承受径向力和轴向力。润滑油在齿轮啮合处形成油膜,减少摩擦和散热。
05图纸绘制技巧
电气原理图中主电路用粗实线、控制电路用细实线区分,所有电气元件标注文字符号(GB/T 5094),车生产线焊执行元件的供电回路应标注额定电压和额定电流 PLC接线图中每个I/O点标注地址(I0.0/Q0.0等)和连接的传感器/执行器名称,模拟量通道标注信号类型(0-10V / 4-20mA),种形式的焊反馈信号标注屏蔽要求 控制柜布局图标注PLC、车生产线焊、断路器、继电器和接线端子的实际安装位置,强电区与弱电区之间用虚线框分隔并标注屏蔽接地要求,柜体标注防护等级IP54/IP65 PLC程序流程图按照汽车生产线焊接机器人结构的工作流程绘制,每个执行步骤旁边标注对应的I/O信号状态和定时器/计数器当前值,暂停/急停/故障复位等安全逻辑用独立分支标注 电磁阀/继电器驱动回路图中标注即点焊的线圈电压(DC24V/AC220V)、续流二极管型号和触点容量(如AC250V 5A),每个输出回路标注对应的PLC输出点地址
06资料价值与适用人群
本资料包含Word版设计说明书1份(约57页,约20000字)、CATIA三维模型。适合机械设计制造及其自动化专业学生。说明书内容完整,从方案论证到详细设计均有详细阐述,对同类课题的毕业设计有较好参考价值。全套资料规范性好,文档和图纸均可编辑修改。
