
顺畅地把数据线插入USB接口,麻利地叠毛巾,轻柔地捏气球……上海新智具身智能公司向记者展示了机器人夹爪的精细操作能力。
昨天,源自复旦大学可信具身智能研究院孵化的这家企业宣布完成近亿元天使轮融资,将开发迭代“视觉—触觉联合嵌入世界行动模型”,构建引入触觉智能的传感器层、数据层、模型层技术体系,让人形机器人早日胜任工厂、家庭等场景的精细化工作。
本轮融资由上海国投旗下上海科创集团、复旦科创联合领投,上海科创集团旗下策源基金等机构跟投。复旦可信具身智能研究院是复旦大学为发展新工科设立的一家机构,通过整合计算机视觉、自然语言处理、机器人学、控制系统及科技伦理等科研团队,开展具身智能领域的前沿理论研究、关键技术攻关和成果转化。近日,上海科创集团与复旦可信具身智能研究院签署战略合作备忘录,新智具身正是双方合作的标杆项目。
分。
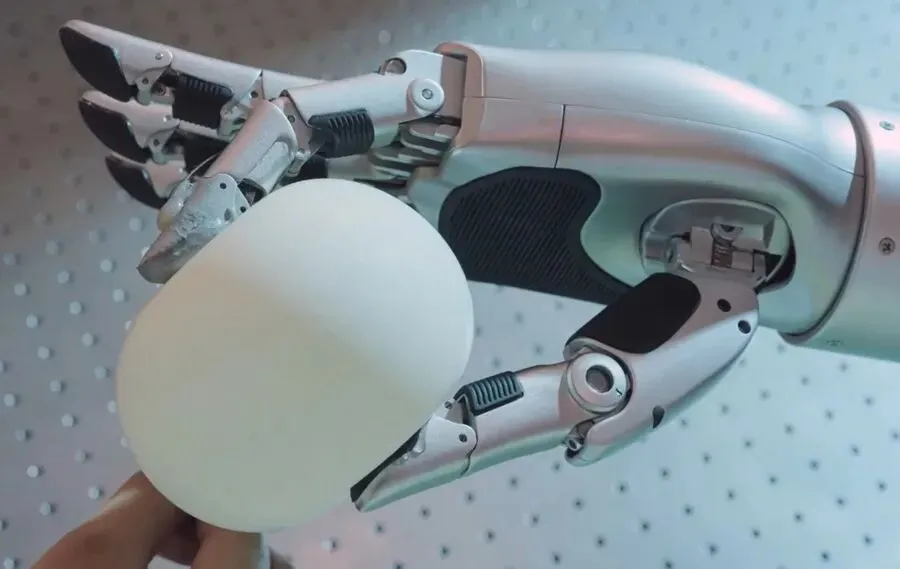
机器人夹爪轻柔地捏气球,不会捏爆。
上海科创集团新智具身项目投资经理张立凡介绍,目前具身智能模型的技术路线尚未收敛,同时存在大小脑、VLA(视觉—语言—动作)模型、世界行动模型等多条路线。复旦可信具身智能研究院的研究图谱覆盖基于视频生成的世界模型、基于3D重建的数据增强、多系统融合的VLA模型、视触觉传感器等领域,其中“视觉—触觉联合嵌入世界行动模型”具有原创性,是具身智能领域极具竞争力的一条技术路线。
为何要把机器人的触觉与视觉联合,嵌入世界行动模型?新智具身研发团队解释,具身智能已进入从技术验证到产业落地的关键窗口期,机器人开始承担精细操作、柔性物体操作和复杂接触任务,仅依靠视觉已难以满足真实物理交互的需求。视觉让机器人看见世界,触觉则让机器人真正感知接触、理解材料、判断受力,并完成稳定操作。触觉模态的引入,将成为具身智能从“看懂任务”迈向“完成任务”的关键一步。
围绕触觉,研发团队搭建了传感器层、数据层、模型层技术体系。在传感器层,公司研发出InTac系列视触觉传感器,它们用于采集接触过程中的力、滑移、形变和边界等信息。该系列传感器已进入国内头部具身智能企业体系,正在精细操作、数据采集和模型训练等场景中开展验证。

InTac系列视触觉传感器
在数据层,公司已建成上千平方米的具身数据采集工厂,围绕工业装配、柔性物体操作、非刚性物体操作、日常服务等方向,形成面向触觉具身大模型训练的数据生产基础设施。

具身数据采集工厂
在模型层,公司正在研发包含触觉模态的具身大模型,目标是将触觉融入VLA模型、世界模型、强化学习等当前具身智能主要技术路线,增强机器人在真实接触过程中的物理感知能力。
“机器人完成精细操作的一个重要前提,是在接触发生时作出准确判断。”新智具身CEO赵世豪说,“我们团队同步布局传感器、数据平台和模型,是希望把真实、连续的触觉数据转化为机器人可学习、可泛化的能力,最终提升其自主感知、动作规划和任务执行水平。”
为推动复旦新工科成果转化为新质生产力,上海科创集团投资团队启动了“1公里加油计划”,并成立专项小组,为新智具身提供全方位支持,集中力量破解科技成果转化“最后1公里”的落地堵点。
投资团队组织行业专家,为新智具身提供商业化指导和产业对接,帮助公司优化商业化节奏与布局。在持续赋能下,这家初创企业快速成长,最新研发的“视觉—触觉联合嵌入世界行动模型”面向精细化操作,在我国还没有同类产品问世。凭借这一成果,新智具身已与多家企业在线束装配、齿轮装配、衣服折叠等高难度场景建立商业化合作,其创新能力得到了产业界验证。
来源:上观新闻



长按关注“科创上海”视频号
在这里
看见上海科创的无限可能
