加入高工机器人专业行业群,加微信:18565829548,出示名片,仅限机器人及智能制造产业链相关企业。
3月27日,灵巧手及具身智能机器人研发商——知行机器人科技(苏州)有限公司(以下简称“知行机器人”)宣布,已于近期完成累计近亿元的B+轮、B++轮融资。


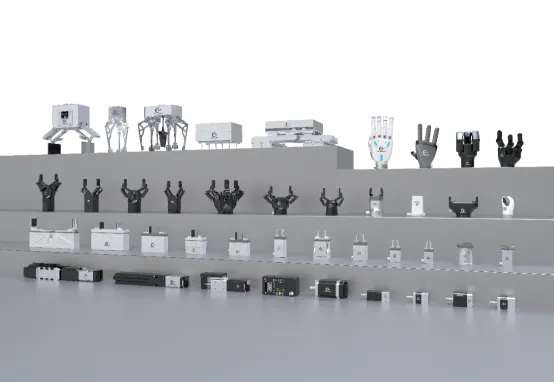
知行机器人成立于2018年,专注于机器人灵巧手、电动夹爪、旋转和线性执行器以及具身智能机器人系统解决方案的研发与生产,目前已推出智能手全系列产品40余款,产品形态囊括了两指到五指不等,负载能力覆盖0.1kg至150kg,是国内产品矩阵最全的末端执行器厂商之一。

「知行机器人」灵思手
2026年2月,知行机器人带来了创新之作——全球首款可左右自适应切换的五指灵巧手“束巧手”,这款产品采用仿生绳驱结构,自由度极大提升,拥有16个关节,11个主动自由度,运动轨迹超越人手。相较传统灵巧手的单一形态,“束巧手”通过自适应翻转,仅需一只手可同时采集左右手操作数据,能在狭窄环境中完成插拔、装配等高精度操作。这种设计让用户的数据采集成本降低一半,并显著提升算法的训练泛化性,目前已应用于航空航天、科研教育及医疗康复等高端服务场景。

「知行机器人」束巧手


从“硬件为王”到“数据驱动”
灵巧手行业进入下半场
商业界有一个共识——“拿着锤子找钉子”是创业大忌。
与当前许多灵巧手初创企业“先造手,再找场景”的逻辑不同,知行机器人坚持根据场景去定义手的设计。白国超表示,知行机器人在创业早期就锁定了重载灵巧机器人手,首先切入航空航天、重载物流、电力设备等高技术壁垒领域,不断积累和打磨硬件产品能力。
以航空航天领域为例,这是电动执行器、灵巧手应用最迫切、最契合的场景。在航空发动机叶片精密称重、分拣和脉动装配拆解等场景中,知行机器人深入理解航空制造的工艺流程和规范,在上述场景中积累了大量稀缺高质量数据集,包括路径轨迹、视觉、力觉、末端感知等,再利用这些数据反哺模型训练,进一步赋能产品实现更泛化的操作能力,从而形成“场景-数据-模型-产品”的迭代闭环。
有了足够高壁垒的场景,高刚性、高精度、用得起的灵巧手产品也成为行业应用的敲门砖。当前人形灵巧手面临“性能、可靠性、成本”的不可能三角,高自由度手虽然灵巧但价格高昂、故障率高、使用寿命也是问题。
“工业场景对机器人手的稳定性和可靠性要求高,几乎不允许出错。”白国超表示,知行机器人在成立之初就坚持核心软硬件技术自研,比如高可靠性核心部件、控制系统等,产品在交付前均经过严苛的寿命测试,例如用于数据采集和预训练模型的“数采手”,可实现500万次以上使用次数,是行业平均水平百倍以上。
在降本方面,知行机器人一开始就采取高标准模块化设计,让灵巧手实现批量生产,能够降低生产和采购成本,这是控本的核心手段。基于长期在供应链领域的积累,知行机器人产品价格仅为同类产品一半左右。
随着下游客户对整体解决方案的需求日益旺盛,灵巧手行业从早期硬件主导向软件数据驱动的趋势也越发明显。
白国超认为,当行业进入规模化应用阶段,数据将成为比硬件本身更深的护城河:“谁能在真实场景中跑通数据闭环,谁就能在下一阶段的竞争中占据先机。”目前知行机器人已形成从数据采集硬件、行业数据采集到具身智能机器人本体的数据闭环能力。
据了解,2026年,知行机器人计划推出高自由度的微型手指关节模组,夯实核心技术底座。考虑到机器人数据集与预训练模型对优化触觉感知能力的需要,知行机器人也计划推出具备视触觉感知功能的灵巧手新品,进一步实现多模态技术和灵巧操作的突破。
关于行业高速发展阶段存在的一些不及预期和挑战,白国超认为,目前灵巧手在通用操作能力方面的进展仍然非常缓慢,这也是马斯克承认Optimus量产的卡点。在硬件层面,难点在于高自由度、高可靠性、输出力和控制精度的优化,以及机器人手是否具有高分辨率的感知能力,并且能够实现与大脑的协同。
“基于我们在国内的产业链和技术开发效率优势,我觉得还是有能力解决这方面的一些难点。”白国超表示,“在未来的应用场景上,经过航天领域的验证,未来重型装备、新能源汽车、锂电、光伏等行业拓展,我们的末端执行器和航空智能机器人,会有更广阔的市场空间。”