
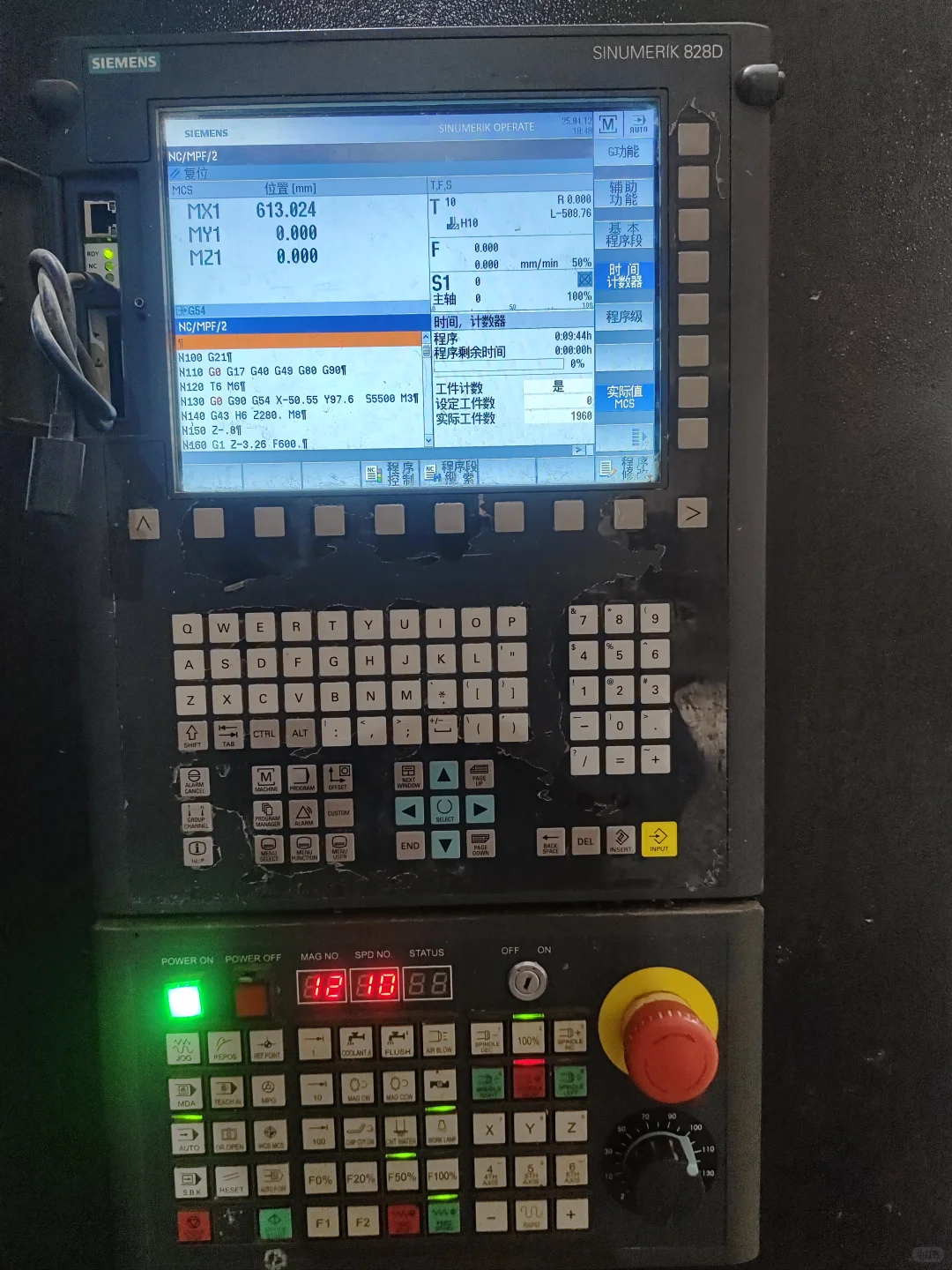
坐标系认识
828D 开机先回零点
如果要把数据抄到G54,在T,S,M里面找到——零偏按选择,最后按启动,——设置零偏——把X,Y归零,系统自动抄数到G54里面。
对刀:JOG(快速)→M(machine)→T,SM→选T(要对的刀号)
→MPG(手轮)→用10mm的铁棒对刀→实际值MCS(在零点
→offset→零偏→有效→MCS(机械坐标)实际值的Z值→刀具清
单→把MCS里的Z值抄到对应刀具长度里。切记:G54坐标里面要负10(这里-10是因为用了10mm的对刀棒)
分中:JOG→M→T,S,M→选T(刀号)、主轴500、
主轴功能(M)顺或M03→INPUT(确定)→
cyclestart(启动)→MPG→设置零偏(WCS绝对坐标)→X₀→确定
→X₁的值除2(这是X坐标第二次碰数,然后先按等于调用计算器÷2就能得到中心点) →计算→确定→在确定→X轴结束→
Y同理
最后auto(自动)→启动
如果要把数据抄到G55,在T,S,M里面找到——零偏按选择,最后按启动,——设置零偏——把X,Y归零,系统自动抄数到G55里面。
偏坐标:在零偏坐标系里面——精准(需要偏置的数值不要超过0.1,不然会报警)
分中棒(寻边器)
单边分中:.M. → T.5.M → T(刀号) S(500转),M3正转
→Input(确定)→start(启动)→ 缓慢移动碰到工件
X₀ → 设置零偏 → 按X位置按X=0 → X向X
或X正移动2mm(或5,详细见M80篇) → 测为X₁的位置
→ 按0 → Input → offset (偏置)→ 零偏 → G54
里面的坐标为工件实际X的坐标
Y同理
视检、不小心复位、 中途停止
方法一
快速模式/手轮→安全高度→程序段搜索→查找模式→带计算带返回→
启动程序搜索→Input→Input
(把进给倍率调越低越好,按恢复状态后提高
进给倍率)→单节模式关闭
方法二(非常好用,非常好用)
中途换刀
暂停——手动模式/手轮模式——主轴停止——手轮模式移动到安全高度——移动到对刀外置——自动对刀(对刀点:工件,D值=铁棒直径,按设置长度,系统会自动读数刀刀具清单)注:固定点也可以,根据实际数值确定——主轴正转——倍率调零——自动模式——启动
说明
①如果不使用自动对刀,在运行模式中,不能对刀,需要打开——单节模式
②带计算带返回是三轴联动的,如果X,Y坐标偏离太远容易撞工件或者夹具
828D 开机先回零点
如果要把数据抄到G54,在T,S,M里面找到——零偏按选择,最后按启动,——设置零偏——把X,Y归零,系统自动抄数到G54里面。
对刀:JOG(快速)→M(machine)→T,SM→选T(要对的刀号)
→MPG(手轮)→用10mm的铁棒对刀→实际值MCS(在零点
→offset→零偏→有效→MCS(机械坐标)实际值的Z值→刀具清
单→把MCS里的Z值抄到对应刀具长度里。切记:G54坐标里面要负10(这里-10是因为用了10mm的对刀棒)
分中:JOG→M→T,S,M→选T(刀号)、主轴500、
主轴功能(M)顺或M03→INPUT(确定)→
cyclestart(启动)→MPG→设置零偏(WCS绝对坐标)→X₀→确定
→X₁的值除2(这是X坐标第二次碰数,然后先按等于调用计算器÷2就能得到中心点) →计算→确定→在确定→X轴结束→
Y同理
最后auto(自动)→启动
如果要把数据抄到G55,在T,S,M里面找到——零偏按选择,最后按启动,——设置零偏——把X,Y归零,系统自动抄数到G55里面。
偏坐标:在零偏坐标系里面——精准(需要偏置的数值不要超过0.1,不然会报警)
分中棒(寻边器)
单边分中:.M. → T.5.M → T(刀号) S(500转),M3正转
→Input(确定)→start(启动)→ 缓慢移动碰到工件
X₀ → 设置零偏 → 按X位置按X=0 → X向X
或X正移动2mm(或5,详细见M80篇) → 测为X₁的位置
→ 按0 → Input → offset (偏置)→ 零偏 → G54
里面的坐标为工件实际X的坐标
Y同理
视检、不小心复位、 中途停止
方法一
快速模式/手轮→安全高度→程序段搜索→查找模式→带计算带返回→
启动程序搜索→Input→Input
(把进给倍率调越低越好,按恢复状态后提高
进给倍率)→单节模式关闭
方法二(非常好用,非常好用)
中途换刀
暂停——手动模式/手轮模式——主轴停止——手轮模式移动到安全高度——移动到对刀外置——自动对刀(对刀点:工件,D值=铁棒直径,按设置长度,系统会自动读数刀刀具清单)注:固定点也可以,根据实际数值确定——主轴正转——倍率调零——自动模式——启动
说明
①如果不使用自动对刀,在运行模式中,不能对刀,需要打开——单节模式
②带计算带返回是三轴联动的,如果X,Y坐标偏离太远容易撞工件或者夹具
