

2511.18509
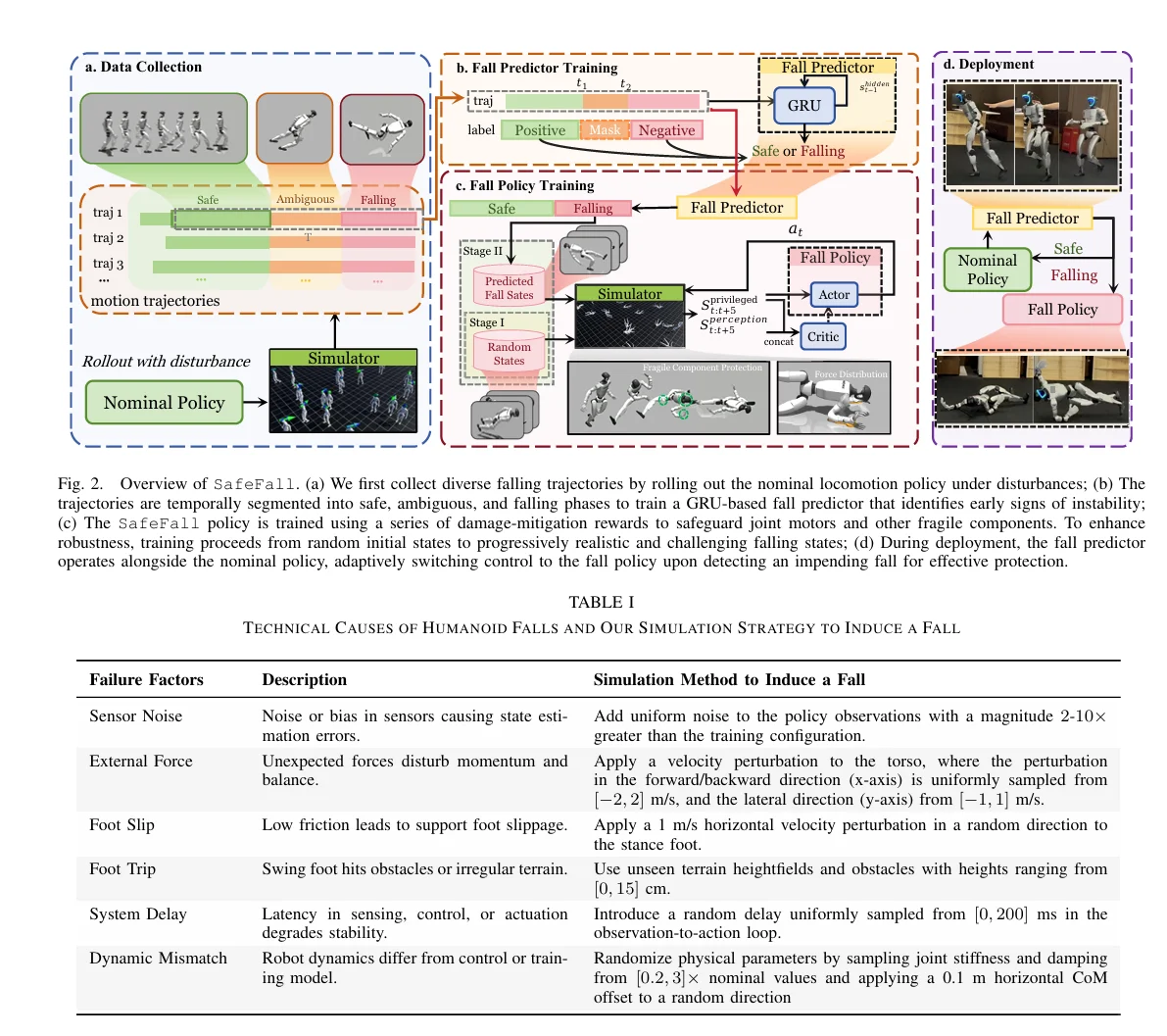
SafeFall 是首个在真实环境中验证的全尺寸人形机器人防摔损伤框架,专为解决双足机器人跌落导致的昂贵传感器、执行器损坏问题设计,可与现有标称控制器无缝协同,正常运行时仅启动预测模块监测状态,无性能干扰,仅在检测到不可避免跌落时激活防护策略,核心由轻量级 GRU 跌倒预测器与强化学习(RL)损伤缓解策略构成,在 Unitree G1 全尺寸人形机器人(29 个自由度)上完成验证。
跌倒预测模块采用单隐藏层(64 个单元)的 GRU 网络,仅依赖机载传感器数据(骨盆在世界坐标系的侧倾与俯仰角、基座角速度、各关节相对默认站姿的角度与角速度),无需外部感知或状态估计,确保部署可行性。训练阶段通过 6 个主要失效因素(传感器噪声、外力扰动、足部打滑、足部绊倒、系统延迟、动力学失配)生成 81920 条轨迹(65536 条用于训练,16384 条用于验证),每条轨迹含恢复尝试与最终跌落过程。为解决 “可恢复失衡与不可避免跌落” 的模糊过渡问题,采用时间分段标注策略:将轨迹按地面冲击时间 T 分为安全段(t≤2T/3,含可恢复失衡以避免误报)、模糊段(2T/3<t≤T-100ms,训练时屏蔽以避免不确定标签干扰)、跌落段(t>T-100ms,确保至少 100ms 响应窗口),最终实现 0.06% 的误报率(FAR)、410ms 预警时间(LT),推理时间不足 0.5ms,训练仅需 5 分钟(单 RTX 4090 GPU)。
RL 防护策略基于 PPO 算法训练,总耗时 280 GPU 小时,采用两阶段课程学习优化泛化能力:第一阶段用简化碰撞几何模型与随机初始姿态(轻微偏离默认站姿、地面上方随机朝向)快速探索基础防摔策略,过滤地面穿透、自碰撞等无效构型;第二阶段从真实跌落数据集(经预测器判定为不安全的状态)采样初始条件,结合完整碰撞模型细化策略,逐步提升训练难度。
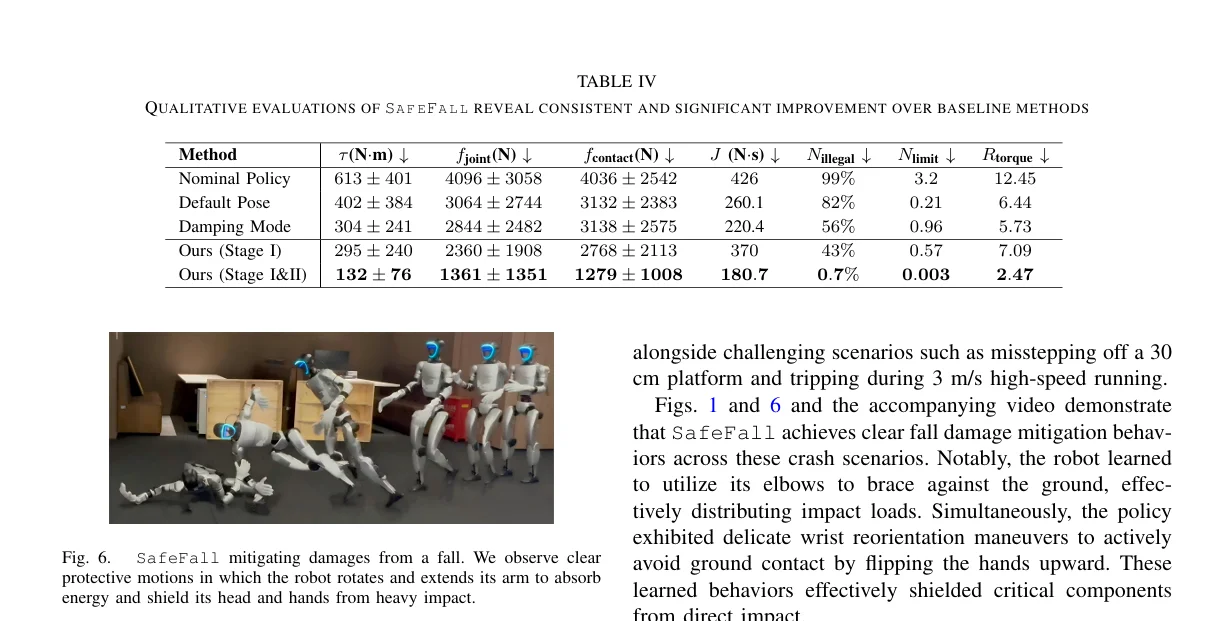
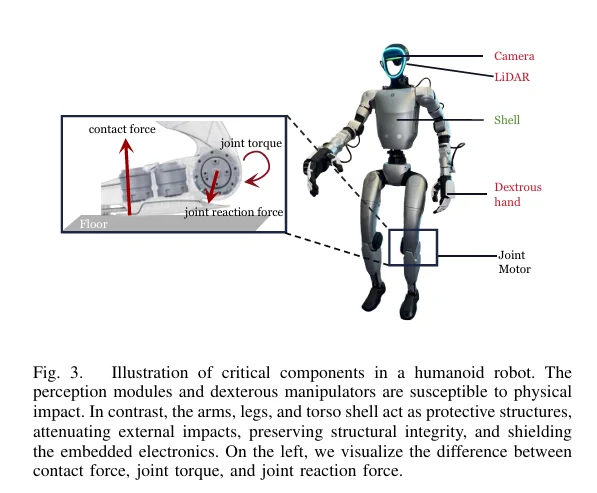
策略训练引入损伤感知奖励机制,核心是平衡 “降低硬件损伤” 与 “保证运动稳定性”:接触力惩罚按部件脆弱性分配权重(头部、手部等高危区域权重 1000,小腿、肩部等中危区域 1,躯干、大腿等低危区域 0.5),仅计算非相邻连杆与地面的有效接触力,过滤因碰撞网格误差导致的相邻连杆虚假力;关节反作用力惩罚基于硬件额定载荷阈值,避免机械连接过载;关节扭矩惩罚限制执行器输出超额定扭矩,防止电气饱和。
SafeFall 是首个在真实环境中验证的全尺寸人形机器人防摔损伤框架,专为解决双足机器人跌落导致的昂贵传感器、执行器损坏问题设计,可与现有标称控制器无缝协同,正常运行时仅启动预测模块监测状态,无性能干扰,仅在检测到不可避免跌落时激活防护策略,核心由轻量级 GRU 跌倒预测器与强化学习(RL)损伤缓解策略构成,在 Unitree G1 全尺寸人形机器人(29 个自由度)上完成验证。
跌倒预测模块采用单隐藏层(64 个单元)的 GRU 网络,仅依赖机载传感器数据(骨盆在世界坐标系的侧倾与俯仰角、基座角速度、各关节相对默认站姿的角度与角速度),无需外部感知或状态估计,确保部署可行性。训练阶段通过 6 个主要失效因素(传感器噪声、外力扰动、足部打滑、足部绊倒、系统延迟、动力学失配)生成 81920 条轨迹(65536 条用于训练,16384 条用于验证),每条轨迹含恢复尝试与最终跌落过程。为解决 “可恢复失衡与不可避免跌落” 的模糊过渡问题,采用时间分段标注策略:将轨迹按地面冲击时间 T 分为安全段(t≤2T/3,含可恢复失衡以避免误报)、模糊段(2T/3<t≤T-100ms,训练时屏蔽以避免不确定标签干扰)、跌落段(t>T-100ms,确保至少 100ms 响应窗口),最终实现 0.06% 的误报率(FAR)、410ms 预警时间(LT),推理时间不足 0.5ms,训练仅需 5 分钟(单 RTX 4090 GPU)。
RL 防护策略基于 PPO 算法训练,总耗时 280 GPU 小时,采用两阶段课程学习优化泛化能力:第一阶段用简化碰撞几何模型与随机初始姿态(轻微偏离默认站姿、地面上方随机朝向)快速探索基础防摔策略,过滤地面穿透、自碰撞等无效构型;第二阶段从真实跌落数据集(经预测器判定为不安全的状态)采样初始条件,结合完整碰撞模型细化策略,逐步提升训练难度。
策略训练引入损伤感知奖励机制,核心是平衡 “降低硬件损伤” 与 “保证运动稳定性”:接触力惩罚按部件脆弱性分配权重(头部、手部等高危区域权重 1000,小腿、肩部等中危区域 1,躯干、大腿等低危区域 0.5),仅计算非相邻连杆与地面的有效接触力,过滤因碰撞网格误差导致的相邻连杆虚假力;关节反作用力惩罚基于硬件额定载荷阈值,避免机械连接过载;关节扭矩惩罚限制执行器输出超额定扭矩,防止电气饱和。
