

CX82-三爪夹具设计|三爪夹具结构设计|三爪夹持器设计|三爪机械手创新设计|三爪机械手设计|三爪机械手结构设计|夹取机械手设计|三爪机器手设计|机器人末端执行器设计|机械手设计
三爪夹具设计【solidworks2024设计+工作原理解释】。
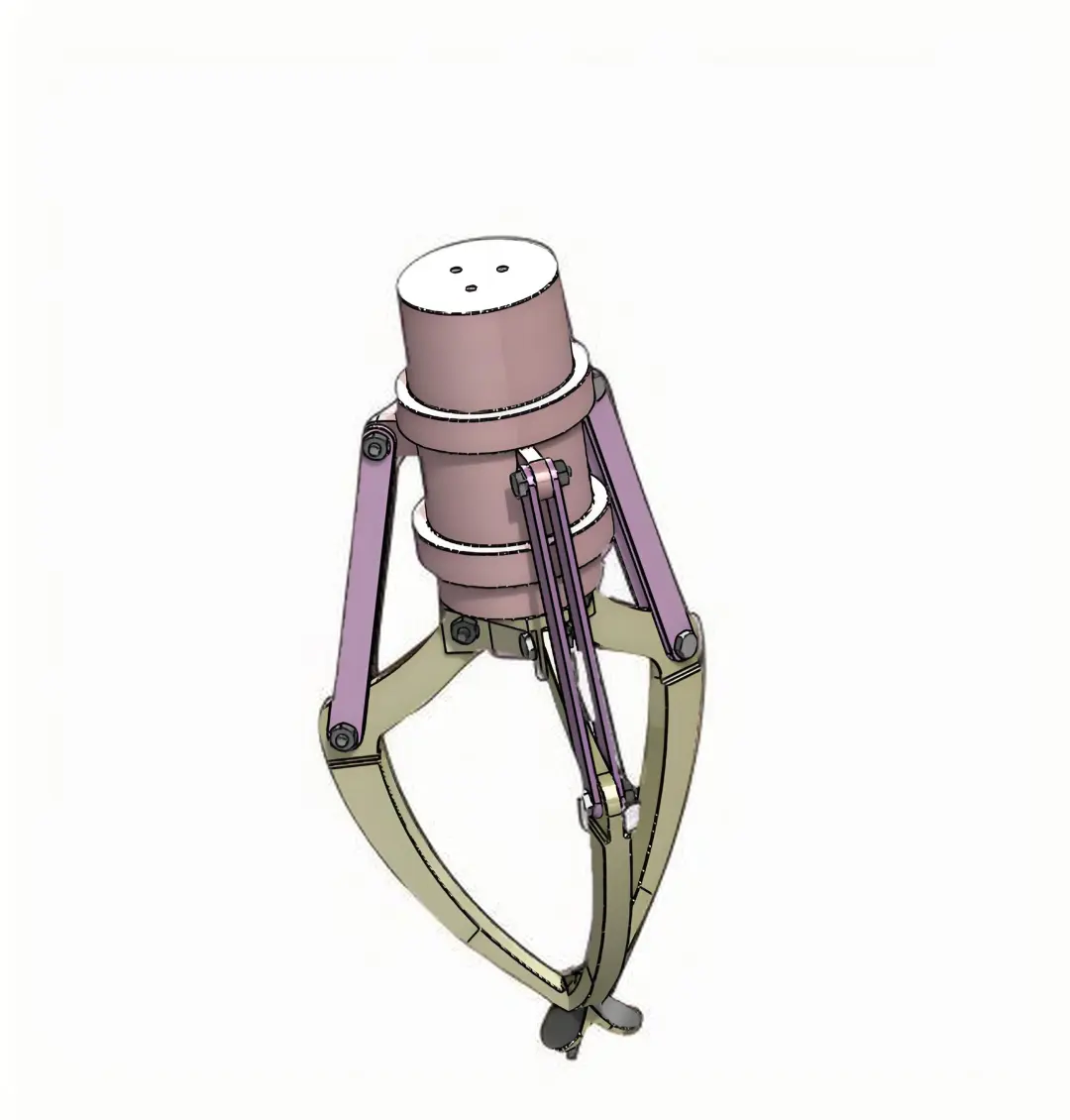
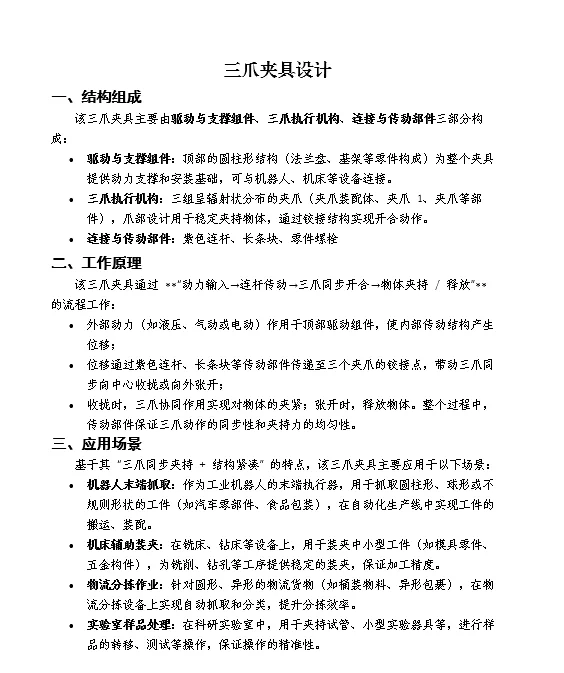
【工作原理】该三爪夹具通过“动力输入→连杆传动→三爪同步开合→物体夹持/释放”的流程工作:
1.外部动力(如液压、气动或电动)作用于顶部驱动组件,使内部传动结构产生位移;
2.位移通过紫色连杆、长条块等传动部件传递至三个夹爪的铰接点,带动三爪同步向中心收拢或向外张开;
3.收拢时,三爪协同作用实现对物体的夹紧;张开时,释放物体。整个过程中,传动部件保证三爪动作的同步性和夹持力的均匀性。
#机械爪 #机械设计 #机械 #结构设计 #机械原理 #机械制图 #三维建模 #机器人 #产品设计 #机械毕业
三爪夹具设计【solidworks2024设计+工作原理解释】。
【工作原理】该三爪夹具通过“动力输入→连杆传动→三爪同步开合→物体夹持/释放”的流程工作:
1.外部动力(如液压、气动或电动)作用于顶部驱动组件,使内部传动结构产生位移;
2.位移通过紫色连杆、长条块等传动部件传递至三个夹爪的铰接点,带动三爪同步向中心收拢或向外张开;
3.收拢时,三爪协同作用实现对物体的夹紧;张开时,释放物体。整个过程中,传动部件保证三爪动作的同步性和夹持力的均匀性。
#机械爪 #机械设计 #机械 #结构设计 #机械原理 #机械制图 #三维建模 #机器人 #产品设计 #机械毕业
