

CX96-线性运动4爪夹持器设计|线性运动4爪夹持器结构设计|四爪夹持器设计|四爪机械手创新设计|四爪机械手设计|四爪机械手结构设计|夹取机械手设计|四爪机器手设计|机器人末端执行器设计|机械手设计
线性运动4爪夹持器设计【solidworks2024设计+工作原理解释】。
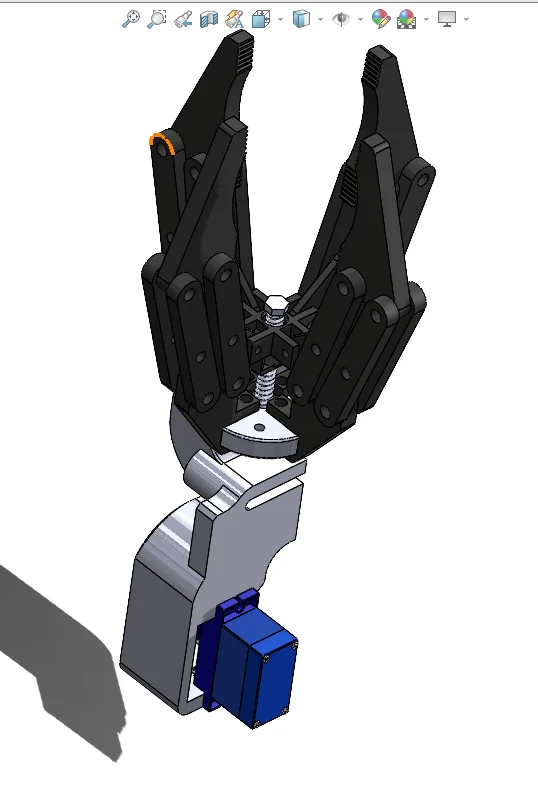
【工作原理】该夹持器基于线性驱动与连杆联动的复合运动原理实现夹持功能:
1.驱动模块产生线性运动(如直线电机的伸缩、气缸的往复),通过传动机构将线性运动转化为连杆的旋转运动。
2.连杆机构的联动作用使四个夹持爪同步做开合运动——当驱动模块推动连杆时,爪子张开;当驱动模块拉动连杆时,爪子闭合,从而实现对物体的夹持或释放。
3.线性运动的行程和连杆的长度设计,决定了爪子的开合幅度和夹持力大小,弹簧元件则在夹持过程中起到缓冲和辅助复位的作用,保证夹持的稳定性。
#机械臂#机械手 #机械爪#机器人 #机械设计 #机械 #机械原理 #结构设计 #机械制图 #机械毕业
线性运动4爪夹持器设计【solidworks2024设计+工作原理解释】。
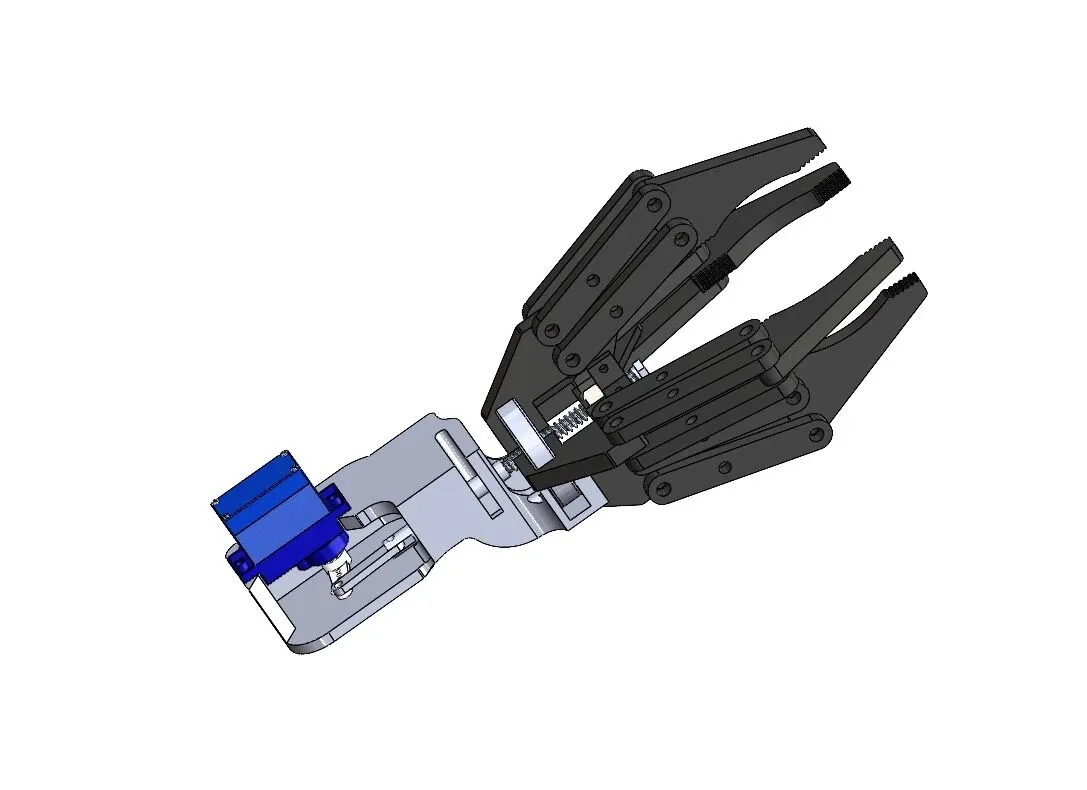
【工作原理】该夹持器基于线性驱动与连杆联动的复合运动原理实现夹持功能:
1.驱动模块产生线性运动(如直线电机的伸缩、气缸的往复),通过传动机构将线性运动转化为连杆的旋转运动。
2.连杆机构的联动作用使四个夹持爪同步做开合运动——当驱动模块推动连杆时,爪子张开;当驱动模块拉动连杆时,爪子闭合,从而实现对物体的夹持或释放。
3.线性运动的行程和连杆的长度设计,决定了爪子的开合幅度和夹持力大小,弹簧元件则在夹持过程中起到缓冲和辅助复位的作用,保证夹持的稳定性。
#机械臂#机械手 #机械爪#机器人 #机械设计 #机械 #机械原理 #结构设计 #机械制图 #机械毕业
