
CX68-二爪夹持器设计|二爪机械手创新设计|二爪机械手设计|二爪机械手结构设计|夹取机械手设计|二爪机器手设计|机器人末端执行器设计|机械手设计
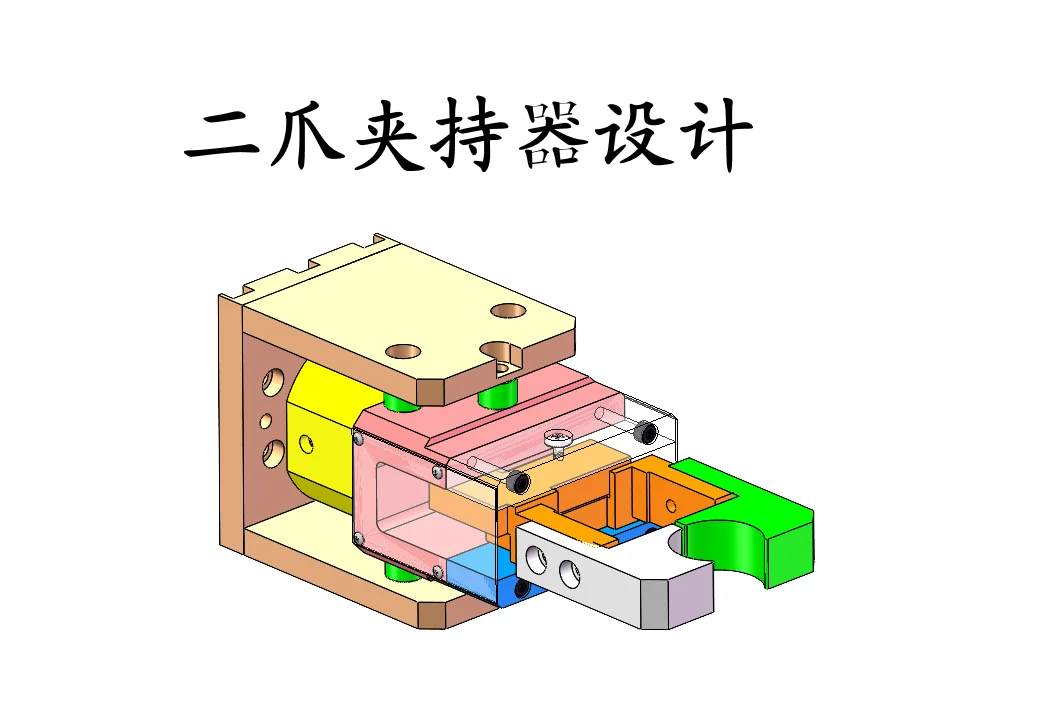
二爪夹持器设计【solidworks设计+工作原理解释】,附stp格式。
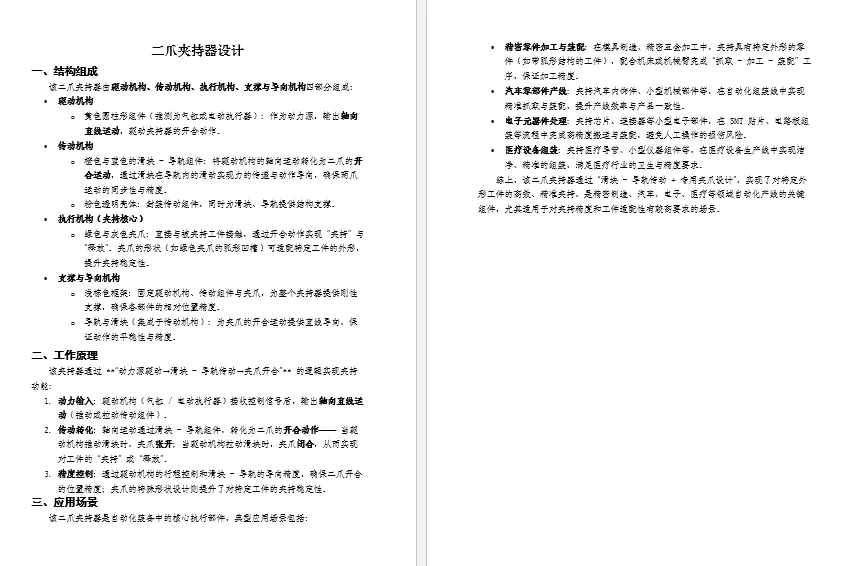
【工作原理】该夹持器通过“动力源驱动→滑块-导轨传动→夹爪开合”的逻辑实现夹持功能:
1.动力输入:驱动机构(气缸/电动执行器)接收控制信号后,输出轴向直线运动(推动或拉动传动组件)。
2.传动转化:轴向运动通过滑块-导轨组件,转化为二爪的开合动作—当驱动机构推动滑块时,夹爪张开;当驱动机构拉动滑块时,夹爪闭合,从而实现对工件的“夹持”或“释放”。
3.精度控制:通过驱动机构的行程控制和滑块 - 导轨的导向精度,确保二爪开合的位置精度;夹爪的特殊形状设计则提升了对特定工件的夹持稳定性。
#二爪 #机械 #机器人 #机械手 #机械设计 #结构设计 #机械原理 #机械制图 #三维建模 #机械毕业
二爪夹持器设计【solidworks设计+工作原理解释】,附stp格式。
【工作原理】该夹持器通过“动力源驱动→滑块-导轨传动→夹爪开合”的逻辑实现夹持功能:
1.动力输入:驱动机构(气缸/电动执行器)接收控制信号后,输出轴向直线运动(推动或拉动传动组件)。
2.传动转化:轴向运动通过滑块-导轨组件,转化为二爪的开合动作—当驱动机构推动滑块时,夹爪张开;当驱动机构拉动滑块时,夹爪闭合,从而实现对工件的“夹持”或“释放”。
3.精度控制:通过驱动机构的行程控制和滑块 - 导轨的导向精度,确保二爪开合的位置精度;夹爪的特殊形状设计则提升了对特定工件的夹持稳定性。
#二爪 #机械 #机器人 #机械手 #机械设计 #结构设计 #机械原理 #机械制图 #三维建模 #机械毕业
