



研究单位: 大阪大学和神户大学
研究背景与问题描述: 海洋资源开发、深海探索和基础设施维护等水下作业越来越重要。由于高压、低温和能见度差,直接人工干预风险高且成本昂贵,因此需要水下远程操作系统。现有的系统大多采用单向控制,仅传输位置指令,而双向控制虽提供了力反馈,但由于水动力干扰等因素,感知反应扭矩变得模糊。
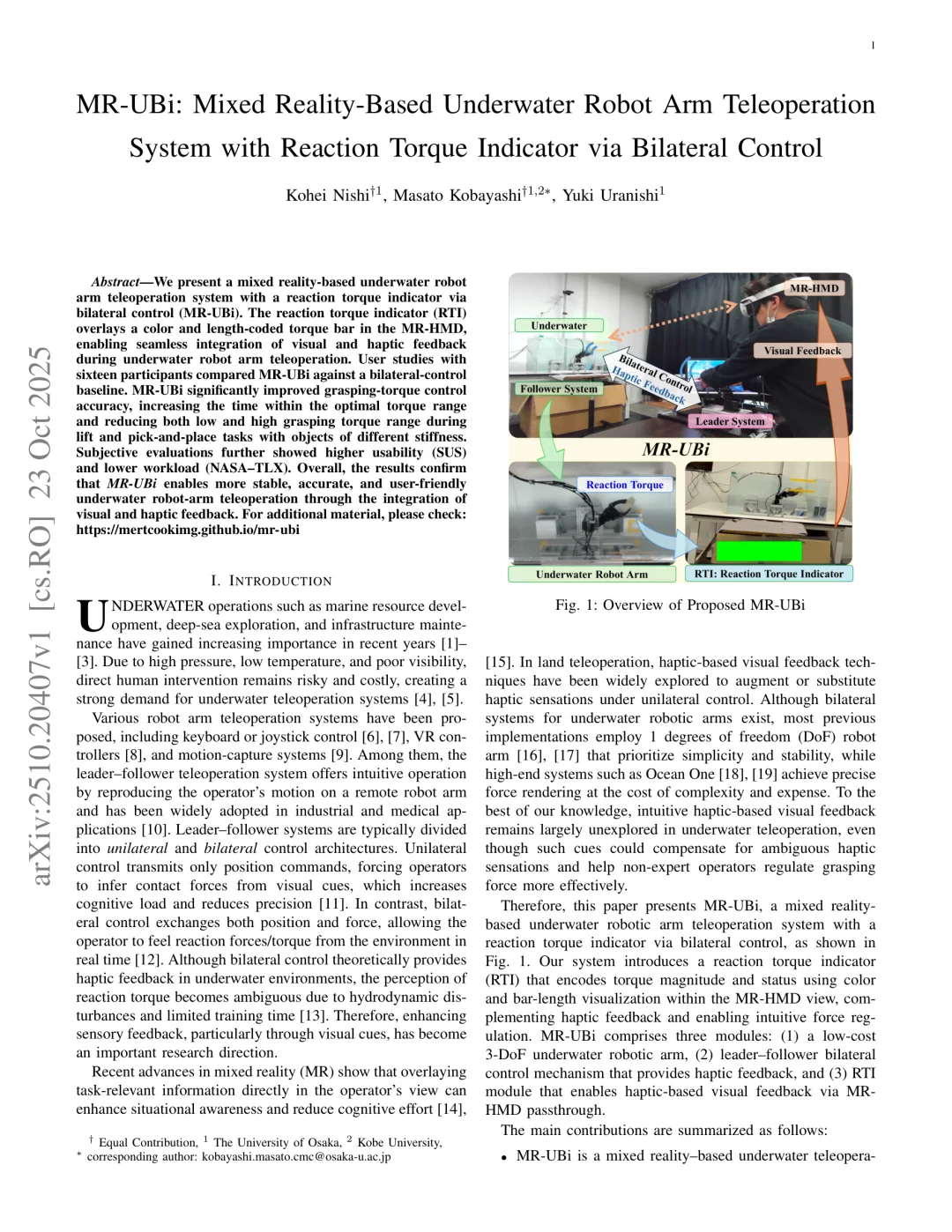
解决方案: 本文提出了一种基于混合现实的水下机器人臂远程控制系统(MR-UBi),通过双向控制提供力反馈,并引入了反应扭矩指示器(RTI)。RTI在头戴式显示器(HMD)中叠加显示扭矩条,编码扭矩大小和状态,增强了视觉和触觉反馈的无缝集成。 #学术分享 #论文解读 #人工智能
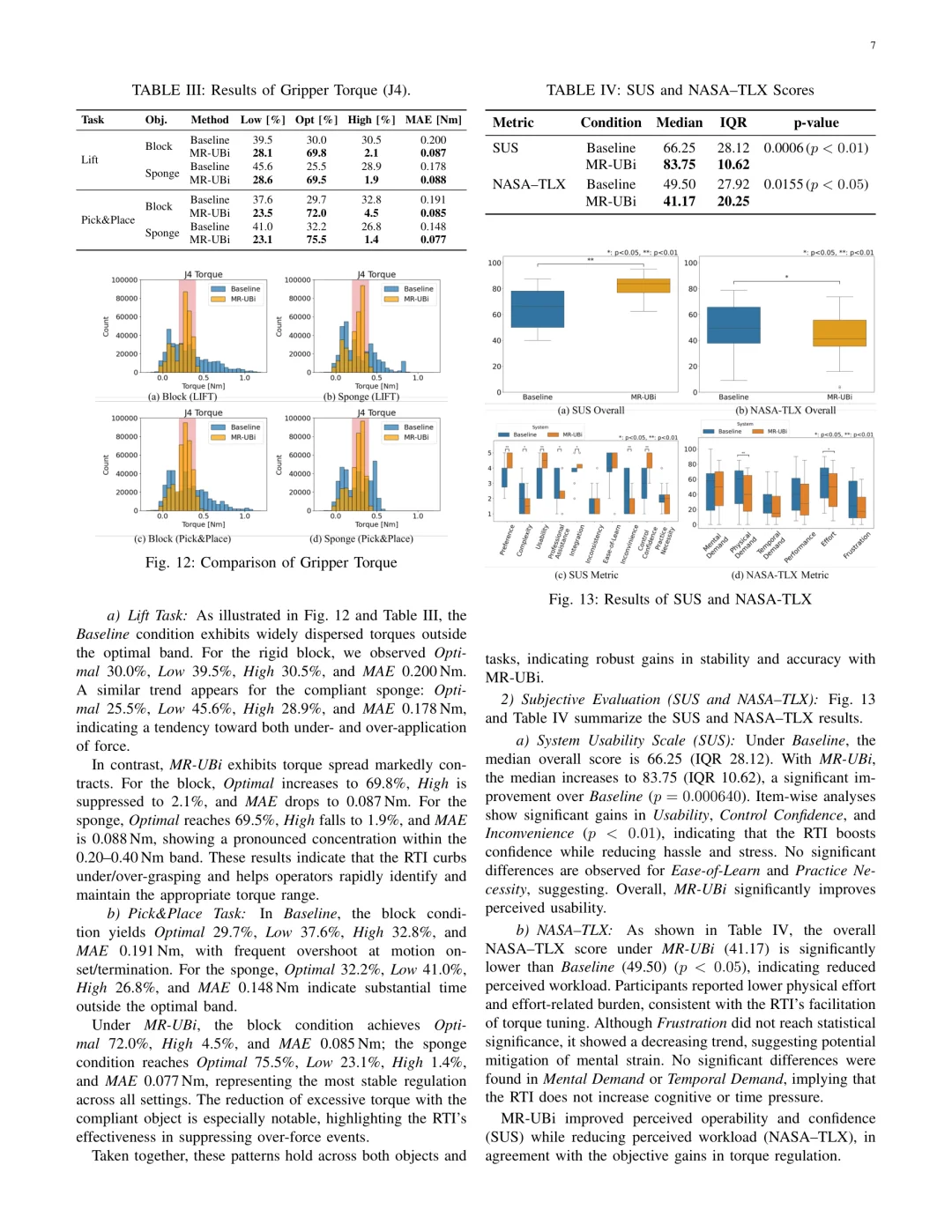
实验: 通过用户研究,对比了MR-UBi与单向控制基线系统的性能。MR-UBi显著提高了抓取扭矩控制的准确性,增加了最佳扭矩范围内的时间,并减少了高低扭矩范围内的误差。主观评估进一步表明,MR-UBi具有更高的可用性和更低的工作负荷。
意义与影响: MR-UBi通过集成视觉和触觉反馈,使水下机器人臂远程操作更加稳定、准确和用户友好。它解决了现有水下远程操作系统中难以感知扭矩变化的问题,尤其适合非专业操作员使用。
研究背景与问题描述: 海洋资源开发、深海探索和基础设施维护等水下作业越来越重要。由于高压、低温和能见度差,直接人工干预风险高且成本昂贵,因此需要水下远程操作系统。现有的系统大多采用单向控制,仅传输位置指令,而双向控制虽提供了力反馈,但由于水动力干扰等因素,感知反应扭矩变得模糊。
解决方案: 本文提出了一种基于混合现实的水下机器人臂远程控制系统(MR-UBi),通过双向控制提供力反馈,并引入了反应扭矩指示器(RTI)。RTI在头戴式显示器(HMD)中叠加显示扭矩条,编码扭矩大小和状态,增强了视觉和触觉反馈的无缝集成。 #学术分享 #论文解读 #人工智能
实验: 通过用户研究,对比了MR-UBi与单向控制基线系统的性能。MR-UBi显著提高了抓取扭矩控制的准确性,增加了最佳扭矩范围内的时间,并减少了高低扭矩范围内的误差。主观评估进一步表明,MR-UBi具有更高的可用性和更低的工作负荷。
意义与影响: MR-UBi通过集成视觉和触觉反馈,使水下机器人臂远程操作更加稳定、准确和用户友好。它解决了现有水下远程操作系统中难以感知扭矩变化的问题,尤其适合非专业操作员使用。
